Final publication date 29 Mar 2021
서울시 가로경관 이미지에 대한 주관적 인지에 영향을 미치는 가로환경 요인 분석 : Deep Learning 의미론적 분할과 YOLOv3 객체 검출기법을 적용하여
Abstract
This study aims to demonstrate the relation between streetscape features and six different individual perceptions, which includes pedestrian satisfaction. Two deep learning techniques—semantic segmentation and object detection—were applied on Google Street View imagery; these techniques captured the streetscape factors from a pedestrian perspective and subsequently extracted various visual elements. In this study, independent variables include not only eight segmented object categories and two features detected from the streetscape images of community roads in Seoul but also factors relevant to the built environment and individual characteristics. In addition, human perceptions were measured through an online survey based on a 5-point Likert scale from 1 (“very dissatisfied”) to 5 (“very satisfied”) (n = 240). Subsequently, by using a multilevel ordered logistic regression model, we examined the factors’ discrete impacts on six different perceptual indicators: vitality, safety, beauty, boring, depression, and overall pedestrian satisfaction. The main results of this study are as follows. Among the segmented objects, sky, vegetation, wall, sidewalk, and pavement have important ramifications as perceptual indicators. In such a case, sky, vegetation, sidewalk, and pavement positively affect overall pedestrian satisfaction, vitality, safety, and beauty; however, the wall has an adverse impact on them. Moreover, the number of pedestrians and vehicles detected from the YOLOv3 algorithm is significantly associated with most perceptual indicators. Pedestrian volume is positively correlated with overall pedestrian satisfaction, vitality, and safety, whereas the effect of the number of vehicles is the opposite. Overall, though this study, we proposed policy implications to improve the walking environment.
Keywords:
Pedestrian Satisfaction, Streetscape, Deep Learning, Object Detection, Semantic Segmentation키워드:
보행만족도, 가로경관, 딥러닝, 객체 검출, 의미론적 분할Ⅰ. 서 론
1. 연구의 배경 및 목적
보행은 인간의 기초적인 통행수단이자 가로(street) 환경을 경험할 수 있도록 도와주는 기본적인 활동이다. 보행 활동은 교통이나 환경 문제뿐만 아니라, 공동체 의식과 생활을 복원시킬 수 있는 하나의 요소로 도시 계획에 있어 매우 중요한 부분을 차지한다. 따라서 보행이란 행위에 있어 보행자가 인지하는 가로공간은 공공공간으로써 일상생활에서 매우 중요한 요소이다.
높은 수준의 가로환경은 사람들의 삶의 질을 향상시킬 뿐만 아니라, 보행 활성화를 통해 도시 활력을 증진할 수 있다. 이와 관련하여 오랫동안 가로환경에 대한 연구가 진행되었으며, 주관적 인지에 영향을 미치는 환경요소를 설문조사와 인터뷰를 기반으로 파악하려는 연구가 이루어졌다(Schroeder and Anderson, 1984; Roth, 2005).
국내에서도 정성적 요인을 고려한 다양한 가로환경 평가가 시도되었다. 특히 서울시 유동인구조사자료에서 조사되었던 보행만족도 점수를 종속변수로 하여 가로환경 요소와의 상관관계를 파악하려는 연구가 이루어졌다(Kim et al., 2014; 이수기 외, 2014). 그러나 보행만족도 지표만을 가지고 가로환경을 평가하면 향후 세밀한 가로환경 전략을 수립하는 데 충분한 근거를 제공하지 못하는 한계가 있다. 따라서 보행 활성화를 위한 필수조건으로 제시하고 있는 가로공간의 생동성(vitality)과 같은 구체적인 평가 지표가 필요하다(김동영, 2013). 또한, 가로공간의 경관적 아름다움(beauty)이나 안전성(safety) 등도 고려될 필요가 있다. 마지막으로, 가로환경 요소가 주관적 인지에 서로 다른 영향을 미칠 수 있다. 일례로 Zhang et al.(2018)은 가로수가 아름다움에 긍정적인 영향력을 미치지만, 안전함, 활기참과는 부정적인 관계가 있을 수 있음을 보였다.
일반적으로 동일한 가로환경 속의 모든 보행자는 물리적 요소들로부터 똑같은 수준으로 노출되어 있다. 따라서 선행연구는 인지 가능한 물리적 환경요인들과 보행만족도 간의 상관성을 확인하는 데 초점을 맞추었다. 다른 한편으로, 일부 연구에서는 객관적 가로환경 현황을 시설물의 존재 여부로 파악하고자 하였다. 하지만 이는 보행자가 실제로 인지하는 과정을 온전히 반영하기 어려운 한계점을 가진다. 구체적으로 보행자의 특정 시야 범위 내에 가로수가 인지되어도 얼마만큼의 비율이 시야를 차지하는가에 따라 주관적 인지에 미치는 정도가 상이할 수 있다.
최근에는 이미지 관련 빅데이터를 딥러닝 기법을 활용하여 처리할 수 있게 되었다. 특히 Google Street View(GSV)와 기타 거리 뷰(Road View) 가로 이미지를 구득하여 가로환경 요소들을 측정하려는 연구가 이루어졌다. 이러한 방법론을 활용하여 정량적으로 산출된 가로경관 디자인 요소들이 보행만족도에 미치는 영향력을 측정할 수 있을 것으로 보인다. 또한, 딥러닝 기법은 높은 해상도의 이미지로 구성된 빅데이터 셋을 시각적으로 인지 가능한 요소로 추출하도록 사용된다. 이는 해당 기법이 향후 높은 수준의 가로환경 구축에 대한 요구를 효과적으로 충족시킬 수 있는 하나의 방법론으로 발전 가능함을 시사한다.
본 연구는 보행 가로환경 이미지를 활용한 설문조사를 토대로 딥러닝 의미론적 분할(semantic segmentation) 기법과 객체 검출(object detection) 기법을 활용하여 이미지에 대한 보행만족도와 주관적 인지를 탐구하였다. 이를 위해 가로환경 요소를 포함하고 있는 GSV 이미지를 구득하였다. 또한, 사진 내 다양한 요소는 의미론적 분할기법과 객체 검출기법을 통해 추출하여 보행만족도를 포함한 주관적 인지와의 관계를 분석하였다. 분석 모형으로는 평가된 표본 이미지 셋(set)과 평가자인 개인의 차이를 구분할 수 있도록 다수준 순서형 로지스틱 회귀모형을 사용하였다.
더불어 보행환경에 대한 충분한 평가를 위해 전체적인 만족도 외 긍정적인 감정에 해당하는 안전함(safety), 아름다움(beauty), 활기참(vitality) 그리고 부정적인 감정을 나타내는 지루함(boring), 우울함(depression)을 평가 항목에 도입하여 각 가로환경 요소가 다양한 감정에 미치는 차별적인 영향력을 비교 분석하였다. 나아가, 본 연구에서 활용된 딥러닝 모델이 가지는 의의와 분석 결과를 토대로 보행환경 개선을 위한 정책적 시사점을 제시하였다.
Ⅱ. 이론적 고찰 및 선행연구 검토
1. 보행만족도와 보행가로환경
보행만족도는 일반적인 만족도의 개념과 상응하여 보행자가 보행환경에 대해 얼마나 만족하는지 나타내는 지표이다. 이는 보행자가 보행환경을 경험하면서 느끼는 긍정적인 정서적·심리적 상태로 볼 수 있다(이제승·이현희, 2019). Stradling et al.(2007)은 만족도를 대신하여 새롭게 불만족도(dis-gruntlement)를 평가 지표로 설정하였으며 혼잡, 안전 등을 포함하는 비도구적 요소(non-instrumental factors)를 관찰하였다. 이는 보행만족도가 하나의 평가 지표임과 동시에 다양한 변수들이 고려되어 결정됨을 보여준다. 나아가 보행만족도를 높임으로써 해당 가로에서의 보행 활동을 증진할 수 있으며 이때 다양한 환경 요소들을 고려해야 한다(Kim et al., 2014).
이와 관련하여 어느 요소가 보행만족도에 영향을 미치는지에 대한 다양한 연구가 지금까지 다수 이루어졌다. 우선 보행만족도는 크게 정량적 그리고 정성적 요인을 바탕으로 평가된다. 정량적 평가의 경우, 차량 통행과 유사하게 보행에도 보행 점유 면적, 보행유율, 그리고 보행 상태를 고려한 서비스 수준 평가 기준이 적용되었다(Fruin, 1971). 그러나 서비스 수준 산정 방식은 자동차 도로 서비스 평가(level of service)로 보행속도 감속 그리고 보행밀도 증가에 따른 서비스 수준 감소가 일어날 수 있으므로 현실에 적용하기에는 한계가 있다(성현곤 외, 2011). 실제로 국내에 적용되었던 USHCM1)의 보행 서비스 수준 평가와 보행자 면접조사를 바탕으로 이루어진 결과를 비교해본 결과, 보행자들은 USHCM의 기준보다 높은 보행 수준을 요구하였다(김경환, 1998).
설문평가를 활용하여 보행만족도와 이에 영향을 미치는 환경요소 간의 상관관계에 대한 연구도 다수 진행되었다. 특히, 가로 설계요소를 포함한 물리적 환경을 다룬 연구가 많이 이루어졌다. 일례로, 변지혜 외(2010)는 진해시의 보행자를 대상으로 설문조사를 시행하여 보도 폭, 거리 조명시설 등의 물리적 보행환경 요인들에 대한 평가 점수를 산출한 다음, 요인마다 전체적인 보행만족도에 미치는 영향을 확인하였다. 이와 유사하게 지우석 외(2008)도 설문조사를 통해 보행환경 만족도에 영향을 미치는 변수를 밝혔으며, 보도 폭, 보행인 수, 그리고 가로수에 의한 음영 정도가 긍정적인 영향을 미치는 것을 확인하였다.
설문자료 외 GIS 데이터 셋을 추가로 활용한 Kim et al.(2014)은 가로환경 특성을 근린 규모(meso scale)와 가로환경 규모(micro scale)로 분류한 다음, 개인 특성(성별, 연령대 등)까지 고려하여 각 변수가 보행만족도 수준에 영향을 미치는 정도를 다수준 순서형 로지스틱 회귀분석을 통해 분석하였다. 그러나 해당 연구와 마찬가지로 물리적 가로환경 특성을 변수로 설정한 연구에서도 가로환경 요소를 이분류(존재=1, 비존재=0)하여 분석하였다(이수기 외, 2014; 김창국 외, 2016). 즉, 물리적 가로환경을 측정하면서 해당 요소를 연속적인 단위로 고려하지 못하였으므로 가로환경 요소와 보행만족도 간의 선형(linear) 관계를 분석하지 못하였다는 한계점이 존재한다.
김규리·이제선(2016)은 3차원인 보행공간을 4개의 면으로 구분하여 각각의 면들을 구성하는 요소들에 대해 보행자가 어떻게 인지하고 보행만족도를 나타내는지 보다 세밀한 공간 단위로 분석하였다. 하지만 연구의 대상지가 이미 보행이 활성화된 가로에 한정되어 있고 대상가로별 설문조사 표본의 수가 적다는 한계점이 존재한다. 또한, 이러한 한계점 외에도 통행목적, 보행행태 등으로 인하여 보행자가 앞에서 다루었던 여러 가로환경 관련 요소들을 실제로 인지하지 못할 가능성이 있다(정연희, 2009). 따라서 보행자가 실제 공간 내에서 인지하는 수준을 객관적 가로환경 현황에 반영하고 보다 다양한 장소의 가로환경을 대상으로 연구를 진행할 필요가 있다.
최근 신경과학, 자기공명 영상학, 그리고 뇌파 측정 관련 기술들이 발전함에 따라 가로환경 사진만을 가지고 개인의 주관적인 감정을 측정하려는 연구가 진행되었다(Berto, 2005; 김정호 외, 2013; Valtchanov and Ellard, 2015). 또한, 전문적인 장치 없이도 세부적인 감정을 파악하려는 시도도 이루어졌다. 그 시도로써, 런던 시내 가로경관 사진들을 대상으로 아름다움(beautiful), 조용함(quiet), 행복함(happy)을 평가 항목으로 설정한 크라우드소싱(Crowdsourcing) 기반 설문이 진행되었다(Quercia et al., 2014). 약 3,300명이 설문에 응답하여 충분한 표본 수를 확보하였지만, 단순히 해당 사진들의 픽셀별 RGB 값, 질감(texture) 그리고 수집된 공간 정보(visual words)를 바탕으로만 분석하는 수준에 그쳤다. 따라서 지속해서 발달하고 있는 이미지 분석 기술을 적용하여 더욱 세밀한 가로환경 분석이 가능하도록 높은 수준의 분석 기법을 구현할 필요가 있다.
2. 딥러닝 기반 이미지 분석
의미론적 분할(semantic segmentation) 기법은 픽셀별로 미리 정의된 몇 개의 유형에 대하여 이미지 내 픽셀을 분류하는 기법으로 시각적 환경을 완전히 이해하는 데 필요한 핵심적인 컴퓨터 비전 기술이다. 기존의 의미론적 분할기법은 사람이 고안해 낸 특징과 분류기를 이용하며 주로 RGB band를 이용하였다. 그러나 같은 색을 띠는 인공 물체와 자연적인 요소들을 구별하지 못해 정확도가 크게 떨어지는 단점이 있었다(Lu et al., 2018). 최근에는 정확도를 높이기 위해 학습 데이터를 이용하여 데이터 기반의 특징을 추출하고 분류하는 방법론이 주목받고 있다.
도시 연구 분야에서의 의미론적 분할기법은 다양한 방면으로 활용되고 있다. 하늘 비율을 시각 개방성의 척도로 사용하여 가로 보행성과 노인의 우울 및 불안장애 사이의 관계를 분석한 연구가 진행되었다(Wang et al., 2019). 비슷한 맥락으로 Yin and Wang(2016)은 각 지점의 파노라마 사진에서 추출된 좌, 우, 정면 방향의 이미지에 인공 신경망(Artificial Neural Network)2)을 적용하여 특징들을 산출하였다. 그리고 하늘 영역을 분류하기 위해 서포트 벡터 머신(Support Vector Machine)3)을 적용한 후, 방향마다 사진 내 하늘 비율과 보행만족도 사이의 상관관계를 분석하였다. 해당 연구들은 하늘을 포함한 가로환경의 특징들을 활용하여 보행 활동과의 연관성을 객관적인 방법으로 측정하였지만, 하늘의 비율만을 측정하였으므로 가로환경을 모두 반영하였다고 보기 어려운 한계점이 존재한다.
일부 연구는 가로환경 이미지에서 얻을 수 있는 특징들을 상세하게 구분하였다. Middel et al.(2019)은 가로경관 이미지를 33개 의미론적 유형을 바탕으로 픽셀별로 분류한 후, 여섯 가지 타입의 범주(하늘, 식물, 빌딩, 침투 표면, 불침투성 표면, 비영구적 개체)로 통합하여 도시의 구성요소를 분석하였다. Zhang et al.(2018)은 가로경관에 대한 사람들의 6가지 인지 지표(안전성, 생동감, 아름다움, 부유함, 우울감, 지루함)와 이미지 요소 간의 관계를 분석하였다. 구체적으로 딥러닝을 사용하여 이미지에 대한 사람들의 인지 지표를 학습시킨 후, 새로 구득한 가로경관 이미지의 시각적 요소들을 분류하여 인간의 인지를 예측하였다. 분석 결과로 안전성, 부유함, 아름다움이 우울감, 지루함, 생동감보다 높은 정확도를 보였다. 이는 높은 정확도를 보인 감각에 대해 사람들이 상대적으로 일관된 개념을 갖기 때문으로 언급하고 있다.
나아가 의미론적 분할기법을 이용하여 장소의 물리적 환경에 대한 인간의 인지를 모델링하고 예측하기 위한 시도가 이루어졌다. 박근덕·이수기(2018)는 딥러닝 모형을 이용하여 가로공간의 보행만족도를 예측하고 검증하기 위한 방법론을 도출하였다. 분석 결과로는 모든 모형에서의 예측값이 유의하게 나타나 딥러닝 모형의 적용 가능성을 보였다. 비슷한 맥락으로 Naik et al.(2014)은 가로에서 인지되는 안전도를 예측하기 위한 모형을 도출하는 등 다양한 분야에서 의미론적 분할기법이 활용되었다.
객체 검출(object detection)기법은 이미지와 영상이 입력되었을 때, 영상 내에 존재하는 다양한 요소들에 대해서 분류(classification)와 지역화(localization)를 수행하는 작업이다. 객체 검출에 대한 딥러닝 알고리즘의 급격한 발전으로 별도의 인적자원 투입 없이 검출기의 성능을 높이고 불확실성을 추정하는 방안이 개발되었다(길호평 외, 2020). 특히 객체 검출기법의 하나인 YOLO는 다른 알고리즘과 비교하였을 때, 검출과 분류를 동시에 수행할 수 있는 매우 효과적인 딥러닝 알고리즘이며, 2018년에는 속도와 정확성이 향상된 YOLOv3가 제시되었다. 해당 알고리즘을 도시 분야에 적용하려는 여러 연구가 이루어졌으며, Mun et al.(2019)는 YOLOv3를 이용하여 어두운 터널 내에서 보행자를 검출하고자 하였다. 이는 녹화된 도로 영상을 대상으로 더욱 높은 정확도로 객체를 탐지하였으며, 주로 터널 내 보행자와 오토바이를 구분하는 것에 큰 주안점을 두었다.
최근에는 고해상도 위성영상과 더불어 다양한 각도와 고도에서 촬영이 가능한 무인 항공기(unmanned aerial vehicle)가 활성화되어 대용량 항공사진을 이미지 데이터 셋으로 활용할 수 있게 되었다. 구체적으로 이러한 이미지를 이용하여 자동차를 탐지하려는 연구가 이루어졌다(유성훈·오성권, 2019; Ammar et al., 2019). 이를 종합하였을 때, 객체 검출기법은 도시 계획 및 관리, 교통 등의 다양한 도시 분야에 적용 가능하다고 판단된다. 특히 객체를 육안으로 검출하거나 직접 세었던 기존의 현장 조사 방법과 달리, 더욱 많은 양의 이미지를 짧은 시간 안에 분석 가능케 해주는 방법이다.
나아가 하늘이 아닌 지상 도로에서 촬영된 사진을 기반으로 차량 검출을 수행한 연구도 몇몇 진행되었다. 특히 객체 검출의 효율성과 정확성을 높이고자 F-YOLOv3 모형이 개발되었다(Liu and Zhang, 2020). 국내에서는 YOLOv3 모형을 통해 가로환경 사진을 학습하고 생활도로 노상주차 식별을 위해 적용한 연구가 이루어졌다(이호준·이수기, 2019). 분석 결과에 따르면 해당 연구의 검출 대상인 노상주차 차량에 대해 약 82.07%의 mean average precision(mAP)를 나타내었다. 따라서 정확도 측면에서 검증된 YOLOv3 모형을 보행자 관점에서의 가로경관 이미지에 적용할 시, 차량뿐만 아니라 보행자, 가로수 등을 검출하여 효율적인 공간 정보 수집이 가능할 것으로 판단된다.
3. 연구의 차별성
앞선 선행연구를 종합해보면, 가로환경에 대한 보행만족도 관련 연구가 상당 부분 이루어졌으며 이에 영향을 미치는 요인들을 규명하려는 시도가 이루어졌음을 확인하였다. 보행자의 주관적 인지에 미치는 물리적 환경요소를 탐색하려는 여러 방법과 최근에 등장한 딥러닝 기술에 대한 가능성도 함께 살펴보았다. 그러나 딥러닝 기법을 사용하여 가로환경 현황을 분석하고 각 물리적 요소별로 다양한 주관적 인지에 영향을 미치는 관계를 확인하려는 연구는 아직 미비하다. 따라서 본 연구는 선행연구와 비교하였을 때, 다음과 같은 차별성을 지닌다.
첫째, 가로환경의 공간 정보를 수집하는 방법에 있어 기존의 설문조사와 같이 현장 기반의 탐색은 상당한 시간과 비용이 필요하다. 이는 다양한 장소의 가로를 연구하기에 비효율적이며 충분한 연구 표본 수를 확보하기 어렵다. 그러나 최근 GSV와 같은 Road View 서비스가 등장하면서 대용량 이미지 데이터를 구득하여 다양한 연구에 활용할 수 있게 되었다. 또한, 본 연구에서는 GSV를 통해 실제 보행자가 인지 가능한 시야와 유사하게 촬영된 이미지를 사용하였다. 즉, 보행자가 인지하는 가로환경을 구축하여 이전보다 명확하게 가로환경 요소를 규명 가능하다는 차별성을 지닌다.
둘째, 다수의 선행연구는 가로환경 물리적 요소들을 측정할 때, 존재 여부로 변수화하였다는 한계점을 가졌다. 따라서 해당 요소가 보행자의 시각적 인지 과정에서 어느 정도 비율을 차지하고 있는지에 따라 상이한 수준의 영향력을 미칠 수 있음을 고려할 필요가 있다. 본 연구는 이러한 한계점을 극복하고자 의미론적 분할기법과 객체 검출기법을 활용하여 물리적 요소들을 정량적으로 분석하고 가로환경을 연속적인 단위로 구축하고자 한다. 나아가 딥러닝 기법을 통해 산출된 값을 바탕으로 보행만족도와 여러 주관적 인지 간의 관계를 분석한다는 점에서 차별성을 가진다.
셋째, 가로환경에 대해 인지하는 여러 가지의 복합적인 감정을 단순히 보행만족도로 귀결시키기에는 향후 가로설계에 있어 세밀한 전략을 제시하기 어렵다. 따라서 동일한 가로환경 요소임에도 불구하고 여러 주관적인 감정에 서로 다른 정도의 영향을 미칠 수 있음을 고려하여 전체적인 만족도 외에 5개의 평가 지표를 도입하였다. 구체적으로 긍정적인 지표에 해당하는 아름다움(beauty), 안전함(safety), 활기참(vitality)과 부정적인 지표에는 지루함(boring), 우울함(depression)을 포함하여 각각의 가로환경 요소가 주관적 인지에 미치는 영향력을 세부적으로 분석한다는 점에서 차별성이 있다.
Ⅲ. 분석 방법
1. 분석 자료와 공간적인 범위
본 연구의 공간적인 범위는 서울특별시이다. 도시 내 폭 11m 미만 생활도로 교차로 간의 중심점을 추출하고(n=144,475), 각 지점별로 GSV 이미지를 구득하였다. GSV는 거리를 따라 차량이 촬영한 가로 이미지를 제공하는 스트리트 뷰(street view) 서비스이다. 따라서 GSV 이미지를 사용하기에 앞서, 차선 수가 넓어질수록 보행자의 시점이 아닌 차량의 시점을 대변할 수 있다는 한계점을 고려하여야 한다. 본 연구에서는 이러한 한계점을 극복하고자 3차선 이하의 도로만을 대상으로 GSV를 구득하였다. 구체적으로, 차선 1개의 너비가 3.5m임을 가정하여 10.5m 이하의 도로만을 설정하였으며, 10.5m 초과, 11m 미만의 도로에 대해서는 실제 해당 지점의 GSV 이미지를 확인하여 3차선일 경우에만 포함하였다.
GSV 사진을 구득하는 과정에 있어 수평각도(heading)와 수직각도(pitch) 파라미터를 입력한 API를 이용하였다(<그림 1> 참조). 수평각도(heading)는 촬영 카메라의 수평각도를 가리키며 북쪽을 의미하는 0도부터 360도 사이의 값을 입력할 수 있다. 본 연구에서는 일반적으로 보행자가 도로의 정방향을 따라 이동하는 상황을 반영하고자 도로가 뻗어있는 방향과 일치하게 heading 값을 설정하였다. 수직각도는 촬영 카메라의 수직각도를 의미한다. GSV를 활용하였던 선행연구의 경우, Yin and Wang(2016)은 보행자가 주변 환경을 인지하는 시야의 수직각도 범위를 -10°~45°로 설정하였고 이호준·이수기(2019)는 가로 전경을 잘 담을 수 있는 각도를 8°로 설정하였다. 따라서 본 연구에서는 경험적으로 수직각도가 10°일 때 보행환경을 인지하는 데 가장 적합하다고 판단하여 해당 값을 설정하였다.

Concept of heading and pitch
총 144,475개의 지점 중, 본 연구에서는 무작위 추출을 통해 10,000개의 지점을 우선 선별하였다. GSV API를 활용하여 지점별 이미지를 구득한 이후, 가로경관이 아닌 건축물 사진, 밤 시간대에 찍힌 이미지 등과 같이 설문조사에 부적합한 사진을 제외하여 총 7,569개의 사진을 선별하였다. 선별된 가로 이미지를 대상으로 건물, 도로, 녹지 등과 같은 가로환경 요소를 다양하게 고려할 수 있도록 400장의 이미지를 선별하였다(<그림 2> 참조). 각 이미지의 촬영연도는 다소 상이하지만, 이미지의 대부분을 차지하는 84%의 사진이 3~5월에 촬영되었다. 또한, 계절에 따른 식생 분포의 편차와 같은 특성이 나머지 시기에 찍힌 사진들에서 크게 드러나지 않아 이미지 촬영 시기로 인한 계절적 영향은 크지 않을 것으로 판단하였다. 나아가, 하늘이 너무 청명하거나, 흐린 사진을 제외하고 유사한 날씨를 보이는 사진만을 활용하였기에 기상 조건이 주관적 인지에 영향을 줄 수 있는 부분을 제어하였다.

Study area
2. 설문조사
앞서 구득하였던 GSV 이미지에 대한 평가는 웹 기반 설문조사인 Google Forms를 통해 이루어졌다. 모든 연령대를 포괄하면서 통계적 유의성을 가질 수 있는 대용량 표본 수집에 한계가 있어 임의표집 방식으로 추출된 20~30대를 대상으로 설문하였다. 설문조사 항목에는 응답자의 개인 특성과 각 이미지에 대한 평가를 위한 문항을 포함하였다. 1개의 설문지는 10장의 사진으로 구성되었으며, <그림 3>과 같이 사진별로 5점 리커트 척도(1: 매우 불만족~5: 매우 만족)를 사용하여 전체적인 만족도(overall satisfaction), 아름다움(beauty), 안전함(safety), 활기참(vitality), 지루함(boring), 우울함(depression), 이상 6개 항목이 평가되었다. 본 연구에서는 240명이 설문조사에 참여하였으며 참가자 1명당 10장의 사진으로 구성된 하나의 설문지에 응답하였다. 또한, 총 40개의 설문지에 대하여 6명이 동일한 설문지에 응답하도록 하여 독립적인 평가가 이루어진 총 2,400개의 샘플을 확보하였다.

Survey sample using Google Forms
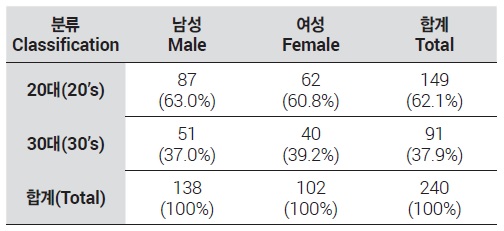
응답자 개인의 특성으로 연령대는 20대 149명, 30대 91명이 응답하였으며, 성별은 남자 138명, 여자 102명이 응답하였다. 설문에 참여한 응답자의 연령과 성별 특성을 나타낸 테이블은 <표 1>과 같으며, 20대와 30대가 각각 전체의 62.1%와 37.9%를 차지하고 있는 것을 알 수 있다.

Characteristics of respondents
3. 변수 구성 및 분석 자료 구축
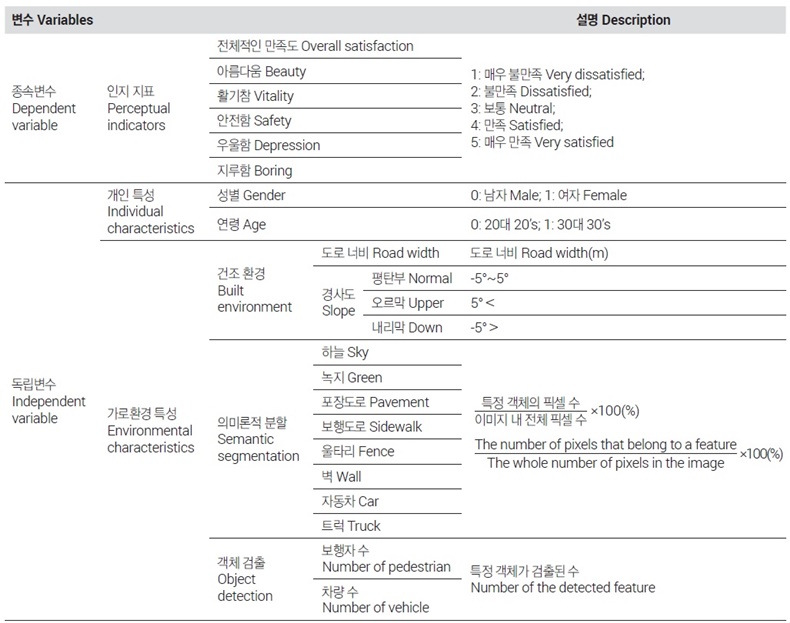
본 연구에서의 분석 변수를 나타낸 표는 <표 2>와 같으며 가로환경 특성에 관한 데이터를 구축하기 위하여 GSV API 메타데이터, 도로망 자료를 이용하였다. 딥러닝 기반 변수의 구축을 위해 Deeplabv3+를 활용한 의미론적 분할기법과 YOLOv3를 활용한 객체 검출기법을 사용하였다.
Description of variables
물리적 특성 중, 기울기 변수는 GSV API의 메타데이터를 통해 산출하였다. 대부분의 기울기가 -5°~5° 사이에 있다는 점을 고려하여 해당 범위를 일반적인 기울기로 판단하였다. 따라서 이를 준거변수로 설정하고 5°를 초과하는 기울기를 오르막(upper), -5° 미만의 기울기를 내리막(down)으로 설정하였다. 도로 너비의 경우, 서울시 도로망 파일의 도로 너비 측정값을 사용하였다.
딥러닝 기법을 활용한 설명변수 중, 의미론적 분할기법을 통해 산출한 변수는 이미지 전체 픽셀에 대해 특정 객체 픽셀이 차지하는 비율 값으로 설정하였다. 의미론적 분할을 진행한 객체의 최대치가 10% 미만의 수치를 보이는 경우와 다중공선성 검증을 통해 분산팽창계수(variation inflation factor)가 매우 높은 객체는 모형에서 제외하였다.4) 객체 검출을 통해 산출한 설명변수는 연구의 목적에 따라 차량과 사람의 빈도수만을 사용하였고 차량 빈도수는 모든 종류의 차량을 통합하여 산출하였다.
4. 딥러닝 기법
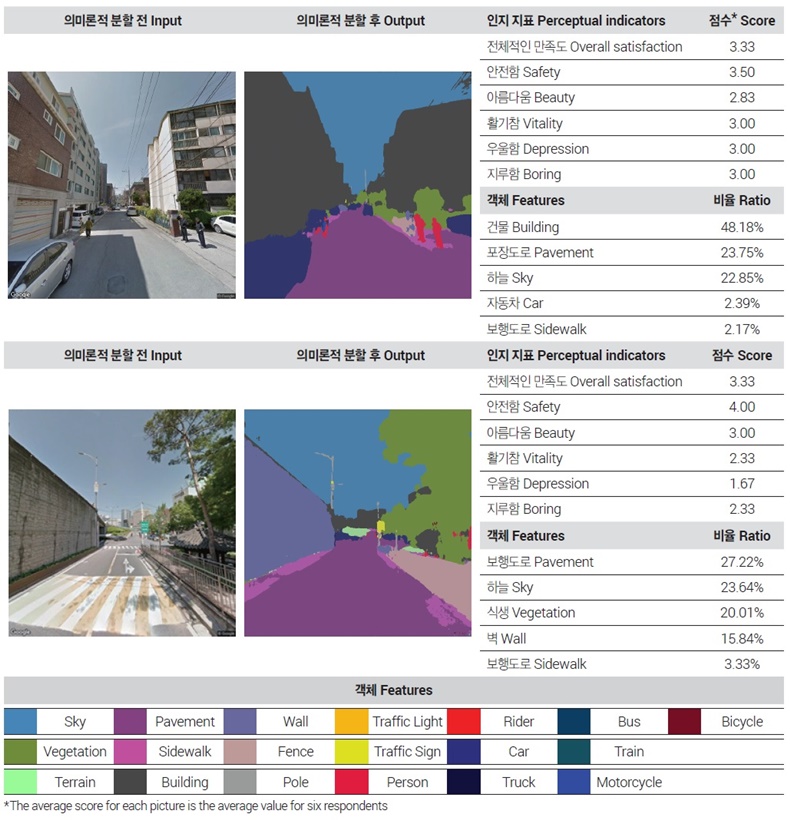
의미론적 분할기법이란 사진 내 각각의 픽셀을 사전에 정의된 객체에 따라 분할하는 것을 의미한다(Hao et al., 2020). 의미론적 분할기법을 위해 여러 딥러닝 모델들이 사용되고 있으며, 그중 Deeplab은 좋은 성능을 보이는 모델 중 하나이다(Chen et al., 2017). 본 연구에서는 Cityscape 데이터 셋을 기학습한 Deeplabv3+ 모형을 적용하여 의미론적 분할 작업을 수행하였다. Deeplabv3+ 모형은 정확도 지표로 주로 활용되는 Mean IoU (Intersection of Union)5)에서 82.1% 값을 갖는다(Yuan et al., 2019). 해당 수치는 상당히 높은 정확도를 보이는 것이며, 이러한 정확도에 기반하여 상당수의 최근 연구에서는 Deeplabv3+ 모형을 활용하여 근린환경을 측정하고 있다(Liu et al., 2019; Nagata et al., 2020; Wang and Vermeulen, 2020). 의미론적 분할을 진행한 예시 및 상위 5개 항목은 <표 3>과 같다.
Examples of semantic segmentation
분할이 완료된 이후, 특정 객체에 해당하는 픽셀이 전체 픽셀에서 차지하는 비율을 계산하여 설명변수로서 분석에 사용하였으며 그 식은 (1)과 같다. 녹지(green) 변수는 terrain 객체와 vegetation 객체의 픽셀 수를 합한 것으로 식 (2)와 같다.6) 전술한 바와 같이 객체 비율의 최대치가 10% 미만의 수치를 보이는 기둥(pole), 교통 신호등(traffic light), 교통 표지판(traffic sign), 버스(bus) 등의 변수, 그리고 분산팽창계수가 매우 높아 다른 변수에 영향을 끼치는 건물(building) 변수는 제외하였다.
| (1) |
| (2) |
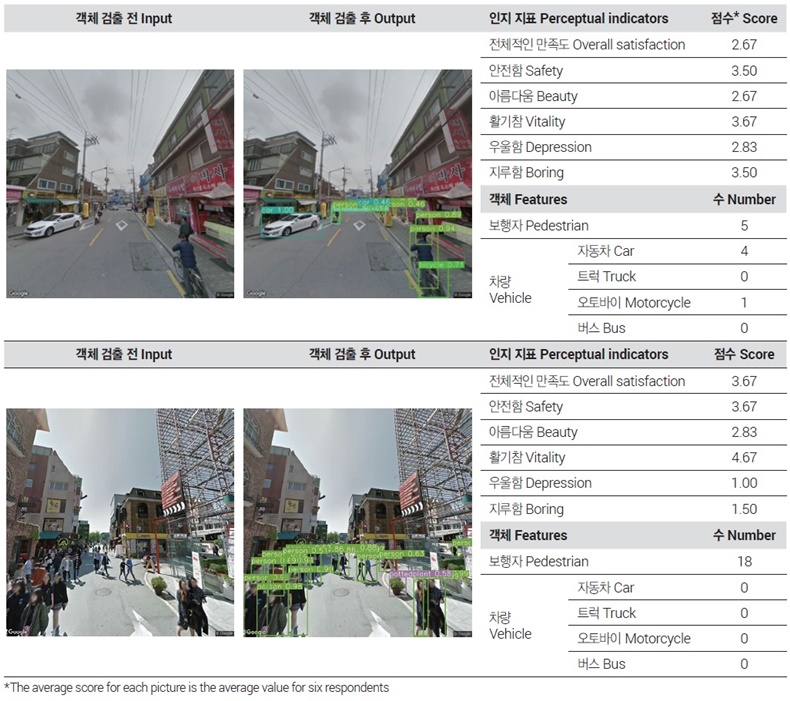
객체 검출기법이란 주어진 사진 속에서 사전에 정의된 객체의 종류와 그 위치를 발견하는 것을 의미한다(Hao et al., 2020). 본 연구에서는 coco 데이터 셋을 기학습한 YOLOv3모형을 적용하였으며, 해당 모형은 사람, 자동차, 트럭, 등과 같이 도심 환경에서 볼 수 있는 객체들의 검출이 가능하다. YOLOv3는 오픈소스이며 이미지의 국부적 특성만을 추출하여 학습하기 때문에 모형의 복잡도가 낮아 학습속도가 빠른 장점이 있다(Buduma and Locascio, 2017; Oh, 2017).
사람(person) 객체의 검출 빈도는 보행자 수 변수로 설정하였고, 차량 수 변수는 자동차(car), 오토바이(motorbike), 버스(bus), 트럭(truck) 객체의 검출 빈도를 통합하여 설정하였다. 객체 검출을 진행한 예시 및 검출 항목은 <표 4>와 같다.
Examples of object detection
5. 분석 방법
본 연구에서는 설문조사와 이미지 분석을 통해 구축한 데이터를 활용하였고 Stata 16을 통해 통계 분석하였다. 각각의 설명변수가 주관적 인지에 미치는 영향을 파악하기에 앞서, 사진 평가가 리커트 척도로 이루어졌다는 점과 사진별 중복 평가의 영향을 제어하고자 다수준 순서형 로지스틱 회귀분석(multilevel ordered logistic regression)모형을 사용하였다.
순서형 로지스틱 회귀분석에서 각 순서형 변수를 구분하는 식(1|2, 2|3, 3|4, 4|5)은 같은 계수 값을 가진다는 것을 가정하며, 일반 로지스틱 모형과 다수준 로지스틱 모형의 표현식은 식 (3), 식 (4)와 같다.
| (3) |
| (4) |
제시한 식에서 yi, yij는 i 샘플에서의 j 개인 혹은 가로환경 수준에서의 측정치를 의미한다. xi, xij는 모든 변수의 공변량이며, ζj는 2수준인 개인, 사진에 대한 임의 절편(random intercept)을 의미한다. 회귀분석에서의 각 공변량은 상호 독립이라는 가정을 지닌다.
Ⅳ. 분석 결과
1. 기술 통계
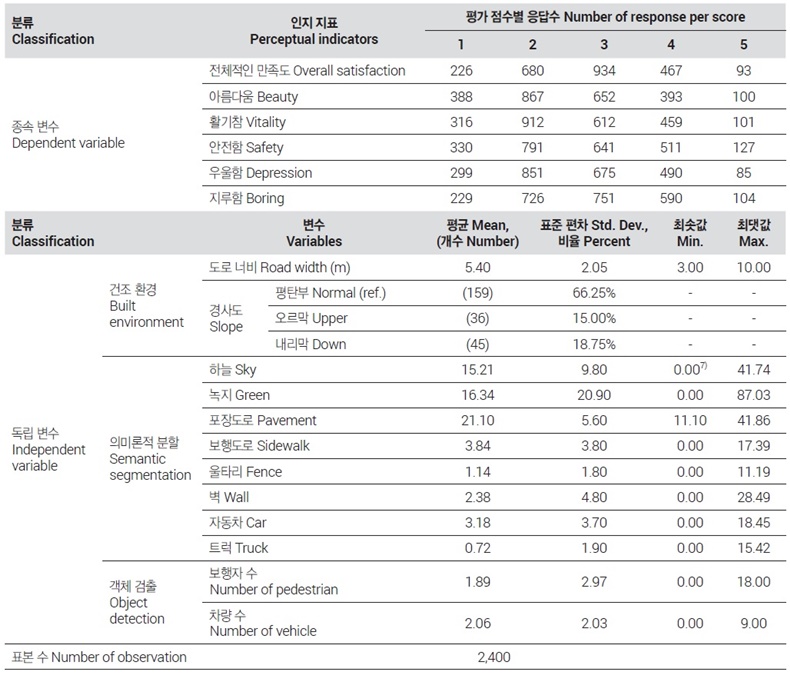
본 연구의 기술 통계 분석 결과는 <표 5>와 같다. 종속변수인 가로경관 이미지 평가 점수는 전반적으로 2점, 3점이며 전체 평가의 약 50%가량을 차지하였다. 대부분의 평가 항목에서 2점의 비율이 30%대로 가장 높았으나, 전체적인 만족도, 지루함의 경우에는 3점(보통)의 비율이 가장 높았다. 또한, 모든 항목에서 5점(매우 만족)은 모두 6% 미만으로 가장 낮을 비율의 응답을 보였다. 응답자는 20대가 149명(62%), 30대가 91명(38%)이었으며 남자는 138명(57.5%) 여자는 102명(42.5%)으로 이루어졌다.
Descriptive statistics analysis
가로환경 특성 설명변수 중 기울기의 경우, 전술한 바와 같이 연속형 변수를 명목형 변수로 변환하고자 기울기에 따라 평탄부(normal), 오르막(upper), 내리막(down)으로 나누었다. 준거변수에 해당하는 평탄부(normal)의 경우, -5°~5° 사이의 경사도 값으로 설정하였다. 전체 도로 너비의 평균은 5.40m이다.
의미론적 분할 변수 중 포장도로가 평균적으로 21.10%로 가장 높은 비율을 차지하였으며, 그 뒤로 녹지가 16.34%, 하늘 15.21%, 그리고 보행도로가 3.84%를 차지하였다. 이외의 변수는 상대적으로 낮은 비율을 차지하는 것으로 나타났다. 객체 검출 변수의 경우, 사진 1장당 평균적으로 약 1.89명의 사람과 2.06대의 차량이 검출되었다.
2. 다수준 순서형 로지스틱 회귀분석
가로환경 요소들이 보행만족도 및 주관적 인지에 어떠한 영향을 미치는지 분석하고자 본 연구에서는 회귀분석을 진행하였다. 우선, 평가 결과에 영향을 미치는 모든 독립변수를 단일 설명변수로 처리하여 분석하는 다수준 순서형 로지스틱 회귀분석 모형을 구축하였다. 그러나 해당 모형은 독립변수가 종속변수에 미치는 영향력을 일대일 관계로만 나타내므로 분석의 한계가 존재한다. 따라서 개인 수준을 2수준으로, 설문 평가된 샘플을 1수준으로 하는 다수준 순서형 로지스틱 회귀분석을 사용하였다(<표 6> 참조).
Multilevel ordered logistic regression analysis
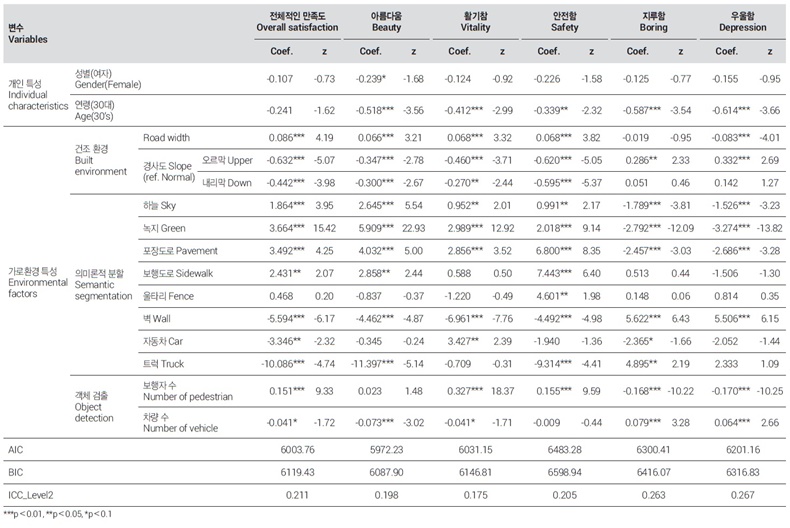
개인 수준 변수의 경우, 독립변수 중 연령대만이 통계적으로 일부 유의한 결과를 보였다. 20대를 더미 변수로 하여 진행한 결과, 30대 연령층일 경우, 긍정적 평가 지표와 부정적 평가 지표 모두에서 유의한 음의 영향을 가지는 것으로 나타났다. 이는 30대일 경우, 모든 감정의 평가에 대해 20대보다 둔감하기 때문으로 판단된다.
의미론적 분할기법을 통해 추출된 설명변수의 경우, 울타리를 제외한 대부분의 가로환경 요소가 통계적으로 유의하게 나타났다. 우선 벽은 활기참에 가장 큰 음의 영향을 미쳤으며 이외에도 긍정적인 평가 지표에 음의 영향을 끼치는 것으로 확인되었다. 이는 보행자가 인지하는 벽의 크기가 클수록, 시각적으로 흥미를 유발하는 물체를 비롯하여 창문, 현관문과 같은 설계요소가 없어 답답하고 위험한 분위기를 연출하기 때문인 것으로 해석된다. 이러한 결과는 벽이 시야를 차단하고 햇빛을 감소시킨다는 내용의 ‘wall effect’를 주장해 온 선행연구와 일치한다(Zhang et al., 2018).
다음으로, 녹지는 전체적인 만족도, 아름다움, 안전함, 활기참 지표와 양(+)의 관계를 가지고 우울함, 지루함과는 음(-)의 관계를 보여 가로환경 내 녹지가 많을수록 보행만족도는 증가하는 것으로 해석된다. 이를 통해, 도시 내 녹시율이 높을수록 보행 욕구가 높아지고, 보행시간이 길어진다는 다수 연구 결과에 따라 녹지가 많을수록 활기참에 영향을 미치는 것을 확인하였다(Lu et al., 2018; Lu, 2019).
하늘은 전체적인 만족도를 포함하여 긍정적인 지표와 양(+)의 관계를 가지고 부정적인 지표와는 음(-)의 관계를 보였으나 다른 요소들에 비해 영향이 크지 않음을 확인했다. 이는 사람들이 자연을 구성하는 하나의 요소로 하늘을 인지하고 건조 환경보다 자연환경을 선호하는 경향이 반영된 결과로 보인다(Valtchanov and Ellard, 2015). 그러나 이러한 결과는 가로경관에서 하늘 비율이 높을수록 건물 높이가 낮고, 나무와 보행자 수가 적어 보행 의지의 감소 및 황량한 느낌을 초래한다는 연구 결과와 상반된다(Yin and Wang, 2016; Wang et al., 2019). 이는 각 나라의 사회적 특성이 가로경관에 반영되고, 해당 국가의 사람마다 인지하는 경향이 다르기 때문으로 판단된다.
포장도로는 모든 평가 지표에 유의한 영향을 미치는 것으로 나타났으며 그중, 아름다움과 안전함, 활기참에서 양(+)의 결과를 보임으로써 선행연구와 유사하게 나타났다(김창국 외, 2016; Zhang et al., 2018). 생활도로는 주로 차량과 보행자가 혼용하는 공간이지만, 포장도로의 비율이 높을수록 차량이 없을 때 보행자가 통행할 수 있는 보행공간 혹은 차량을 피할 수 있는 공간이 넓어지기 때문에 이러한 결과가 도출된 것으로 판단된다. 또한, 보행도로는 전체적인 만족도, 아름다움, 안전함에서 유의미한 양(+)의 관계를 가지는 것으로 나타났다. 특히 안전함에서 가장 큰 값의 계수를 보였으며 이는 포장도로와 보행도로의 비율이 안전함에 가장 큰 영향을 미치는 것을 의미한다. 즉, 의미론적 분할기법에서의 보행도로 검출은 안전함에 있어 통계적으로 매우 유의미한 결과를 보였는데, 이는 보차분리 도로가 보차혼용의 경우보다 안전함에 긍정적인 영향을 더 끼치는 것으로 판단된다. 나아가 보도의 폭이 넓을수록 높은 보행만족도를 나타내는 선행연구 결과와 유사하다(Kim et al., 2014; 김규리·이제선, 2016).
객체 검출기법을 통해 도출한 보행자 수와 차량 수 모두 전반적으로 유의한 결과를 보였으나, 긍정적인 지표와 부정적인 지표에 대해 상반된 영향을 미치는 것으로 나타났다. 보행자 수는 모든 평가 중 활기참에 양(+)의 방향으로 가장 큰 영향을 미친 것을 확인할 수 있는데, 이는 활기찬 감정을 유발하는 주체가 거리 내 보행자이기 때문인 것으로 해석된다. 또한, 보행자 수는 안전함에도 긍정적인 영향을 끼쳤는데, 이는 수많은 보행자 속에서 사람들이 안전함을 느낀다는 Jacobs(1961)의 주장과도 일치한다. 차량 수의 경우, 전체적인 만족도, 아름다움과 음(-)의 관계를 보였으며, 지루함, 우울함과는 양(+)의 관계를 보였다. 이는 응답자가 넓은 도로에 아름다움을 느낀다는 분석 결과에 따라, 차량이 많을수록 도로의 많은 공간을 점유하여 나타난 것으로 해석된다.
마지막으로 건조 환경에 대한 설명변수의 경우, 도로 너비는 전체적인 만족도, 아름다움, 안전함, 활기참을 포함한 긍정적인 지표와 양(+)의 관계를 가졌고, 우울함, 지루함과는 음(-)의 관계를 보여 도로 폭이 넓을수록 보행공간이 넓어져 보행만족도가 증가하는 것으로 해석된다. 경사도가 오르막인 경우, 긍정적인 지표와 음(-)의 관계를 보임과 동시에 부정적인 지표와는 양(+)의 관계를 나타냈으나, 내리막은 오직 긍정적인 지표와만 음(-)의 관계를 가졌다. 이는 사람들이 사진을 통해서 경사도를 인지하여, 경사도가 주관적인 보행만족도에 부정적인 영향을 미친 것으로 판단된다. 또한, 이러한 결과는 앞서 검토하였던 선행연구와의 결론과 유사하다(Kim et al., 2014; 이수기 외, 2016).
Ⅴ. 결 론
본 연구는 가로경관 이미지에 대한 주관적 인지와 보행만족도에 영향을 미치는 요인을 확인하기 위해 GSV 이미지와 딥러닝을 활용하였다. 이미지로부터 산출된 값을 대상으로 다수준 로지스틱 회귀분석을 시행하여 종속변수에 따라 영향을 미치는 각 수준별 독립변수의 차별적인 영향력을 살펴보았고 다음과 같은 결론과 정책적 시사점을 도출하였다.
첫째, 보행자 수는 아름다움(beauty)을 제외한 모든 지표와 유의미한 관계를 가지며 활기참과 가장 높은 양의 관계를 갖는 결과를 보였다. 이는 가로의 보행자가 도시 활력에 가장 중요한 요소 중 하나임을 의미한다. 쇠퇴한 도시에 활력을 불어넣기 위해서는 단순한 공간 개조보다 보행자들이 편리하고 안전하게 보행공간을 활용할 수 있도록 넓은 범위에서 가로환경과 기능의 개선이 필요하다는 점을 시사한다.
둘째, 하늘과 녹지는 전체적인 만족도 및 긍정적 지표와 양의 관계를 갖고 부정적 지표와 음의 관계를 가짐으로써 모든 지표에서 유사한 결과를 보였다. 특히 하늘과 녹지 모두 아름다움에 가장 높은 영향을 미치는 것을 확인했다. 이는 도시의 가로 경관계획 시, 하늘이나 녹지와 같은 자연환경 요소들을 고려한 계획이 이루어져야 함을 시사한다. 또한, 하늘과 긍정적 지표 간의 관계에 있어 선행연구와 대비되는 양의 관계가 도출되었다. 이는 분석 대상 국가의 가로경관 이미지 및 사람들의 인식 차이라고 판단되며, 기존 연구의 결과와 다른 시각을 제시한다는 점에서 의의가 있다.
셋째, 보행도로와 포장도로는 안전함(safety)과 큰 상관관계를 보였다. 이와 같은 요소는 보행자의 안전을 위한 시설로써 이미지만으로도 사람들이 안전함을 크게 느끼는 것을 확인하였다. 이를 통해 사고가 잦거나 위험도가 높은 지역에 대한 보행환경 개선사업을 계획하는 데 도움을 줄 수 있을 것으로 판단된다. 비슷한 맥락으로 경사도는 안전함과 음의 관계를 가졌다. 따라서 보행환경 개선사업에 있어 경사도 역시 고려해야 할 사항으로 판단된다.
넷째, 벽은 긍정적 지표에서 음의 관계를, 부정적 지표에서 양의 관계를 보임으로써 자연적 요소들과는 반대의 결과를 보였다. 보행자 관점에서 가로환경을 접할 때, 고층 건물들의 증가로 야기되는 ‘wall effect’는 가로 만족도를 저감하는 요소로 작용할 가능성이 크다는 것을 시사한다.
본 연구를 통해 보행만족도와 주관적 인지에 영향을 미치는 물리적 가로환경 요소가 존재하고 서로 다른 종속변수에 해당하는 6개 평가 항목에 미치는 정도가 달라질 수 있다는 점을 실증하였다. 또한, 실제 보행자의 시야 범위를 고려한 가로경관 이미지를 세밀하게 분석하고자 딥러닝 기법인 의미론적 분할기법과 객체 검출기법을 사용하였다. 즉, 가로환경 현황에 대해 정량적으로 산출된 값을 바탕으로 종속변수 간의 선형관계와 차별적인 영향력을 확인할 수 있었다는 데 의의가 있다. 하지만 본 연구는 다음과 같은 한계점을 지닌다.
첫째, 본 연구에서는 비확률적 임의표집 방식으로 설문조사를 실시하여 분석 결과를 일반화하는 데 한계가 있다. 또한, 효율적인 설문 시간을 고려하여 핵심적인 개인 특성 변수인 성별과 연령을 제외한 다른 변수를 포함하지 못하였다. 이러한 한계는 향후 전체 연령층에 대해 다양한 개인 특성을 고려한 확률적 표집 방법을 통해 개선될 수 있을 것으로 판단된다.
둘째, 의미론적 분할기법의 결과로 도출되는 가로환경 요소 중에서 건물(building) 변수는 가로환경에서 중요한 요소임에도 불구하고 개방성을 대변하는 하늘 변수와 높은 다중공선성을 보였기에 제외하였다. 또한, 의미론적 분할기법은 이미지 안에서 전체적인 건물의 비율을 측정할 수 있지만, 건물 외벽의 세부적인 요소인 벽면, 창문, 유리, 재질, 색깔 등을 구체적으로 구분하는 단계에는 아직 이르지 못한 상태이다. 보행만족도의 경우, 동일한 크기의 건물이 있다고 해도 창의 크기, 외벽 색깔, 벽면의 재질 등에 따라 보행자가 느끼는 만족도는 다를 수 있다. 이러한 한계점은 가로경관 이미지의 세부 요소를 정확하게 검출할 수 있는 딥러닝 알고리즘과 객체검출 기법이 개발되면 개선될 수 있을 것으로 판단된다.
셋째, 설문용 사진으로 사용된 GSV는 보행자가 아닌 차량이 촬영한 사진으로 보행자의 시각을 완벽하게 대변한다고 보기 어렵다. 구체적으로 높이 측면에서는 GSV를 촬영한 구글 촬영 카메라가 약 2.5m에 달하는 높이에 설치되었기에 실제 보행자의 눈높이와 차이가 존재한다. 추가로 본 연구에서는 보행자와 차량 간의 수평적인 시점 차이 문제를 경감시키기 위해 폭이 넓지 않은 생활도로에 집중하여 수평적인 시각 차이에 대한 문제는 크지 않을 것으로 판단된다. 하지만 이와 같은 고려가 없을 시, 차량과 보행자 간의 수직적인 시각 차이뿐만 아니라, 수평적인 시각에서도 상당한 차이가 존재할 것으로 판단된다. 따라서 GSV 이미지와 같은 거리 뷰 자료를 보행자 연구에 활용할 경우, 이에 대한 주의가 필요하다고 볼 수 있다.
마지막으로, 본 연구에서는 가로환경 요소와 개인의 주관적 인지 간의 선형관계를 가정하고 회귀분석을 진행하였다. 하지만 대표적으로 개방성을 대표하는 하늘 변수와 같이 이미지 내 해당 요소가 과도하게 많으면 개인이 황량하다고 인지할 수 있고 이와 반대로 비율이 낮을 경우에는 폐쇄감을 유발하여 부정적인 감정을 불러일으킬 수 있다. 따라서 가로환경 요소와 개인 인지 사이의 선형관계가 아닌 요소별 적정 값이 존재하는 비선형관계가 고려될 필요가 있다고 판단된다.
Acknowledgments
이 논문은 2018년 한국연구재단의 지원을 받아 수행된 연구(NRF-2018R1A2A2A05023583)이며, 2020년 대한국토·도시계획학회 추계학술대회에서 발표한 논문을 수정·보완하였음.
References
-
길호평·정준영·박상우·박유상, 2020. “검출 성능 향상 및 불확실성 추정을 위한 다목적 객체 검출 알고리즘”, 2020 한국자동차공학회 춘계학술대회, 강원도 홍천: 쏠비치 호텔 & 리조트 삼척, 360-366.
Gil, H.P., Jung, J.Y., Park, S.W., and Park, Y.S., 2020. “A Proposed Multi-Task Object Detector to Improve AP and Estimate Uncertainty”, Paper presented at the KSAE 2020 Annual Spring Conference, Gangwon, Hongcheon: Solbeach Samcheok, 360-366. -
김경환, 1998. “국내 보행 서비스수준의 평가기준”, 「대한교통학회지」, 17(3): 31-46.
Kim, K.W., 1998. “Evaluation Criteria of the Walkway Level-of-Service in Korea”, Journal of Korean Society of Transportation, 17(3): 31-46. -
김규리·이제선, 2016. “보행공간 요소에 대한 보행자의 인지 및 보행만족도에 관한 연구”, 「도시설계」, 17(3): 89-103.
Kim, K.R. and Lee, J.S., 2016. “Pedestrian Cognition and Satisfaction on the Physical Elements in Pedestrian Space”, Journal of the Urban Design Institute of Korea, 17(3): 89-103. -
김동영, 2013. “판교테크노밸리 사무직 종사자의 보행만족도 및 보행행태에 영향을 미치는 보행환경 요인 분석”, 서울대학교 환경대학원 석사학위논문.
Kim, D.Y., 2013. “An Analysis on the Factors Affecting Walking Satisfaction and Walking Behavior of Pangyo Technovalley Office Workers”, Master’s Degree Dissertation, Graduate School of Environmental Studies, Seoul National University. -
김정호·김원태·윤용환, 2013. “도시지역의 녹지경관 조망이 도시민의 스트레스 완화에 미치는 영향”, 「한국환경생태학회지」, 27(4): 516-523.
Kim, J.H., Kim, W.T., and Yoon, Y.H., 2013. “Beneficial Effect of Green Landscape on Relieving Stress of Citizen in Urban Area”, Korean Journal of Environment and Ecology, 27(4): 516-523. -
김창국·임하나·최창규, 2016. “보행 목적별 보행자 만족도에 영향을 미치는 근린 건조 환경 구성요소 특성 분석”, 「국토계획」, 51(4): 145-159.
Kim, C.G., Im, H.N., and Choi, C.G., 2016. “Built Environment, Walking Trip for Different Purposes, and Pedestrian Satisfaction”, Journal of Korea Planning Association, 51(4): 145-159. [ https://doi.org/10.17208/jkpa.2016.08.51.4.145 ]
-
박근덕·이수기, 2018. “가로공간 보행만족도 예측을 위한 딥러닝 모형의 적용과 검증”, 「도시설계」, 19(6): 19-34.
Park, K.D. and Lee, S.G., 2018. “Application and Validation of a Deep Learning Model to Predict the Walking Satisfaction on Street Level”, Journal of the Urban Design Institute of Korea, 19(6): 19-34. [ https://doi.org/10.38195/judik.2018.12.19.6.19 ]
-
변지혜·박경훈·최상록, 2010. “물리적 보행환경이 보행만족도에 미치는 영향”, 「한국조경학회지」, 37(6): 57-65.
Byeon, J.H., Park, K.H., and Choi, S.R., 2010. “The Effect of Physical Pedestrian Environment on Walking Satisfaction”, Journal of the Korean Institute of Landscape Architecture, 37(6): 57-65. -
성현곤·김태호·강지원, 2011. “구조방정식을 활용한 보행환경 계획요소의 이용만족도 평가에 관한 연구: 종로 및 강남일대를 대상으로”, 「국토계획」, 46(5): 275-288.
Sung, H.G., Kim, T.H., and Kang, J.W., 2011. “A Study on Evaluation of User Satisfaction for Walking Environment Planning Elements through Structural Equation Modeling: The Case of Jongno and Kangnam Areas”, Journal of Korea Planning Association, 46(5): 275-288. -
유성훈·오성권, 2019. “CNN을 이용한 고해상도 위성사진에서의 객체검출에 관한 연구”, 2019년 제50회 대한전기학회 하계학술대회, 강원도 고성: 델피노리조트, 1608-1609.
Yoo, S.H. and Oh, S.K., 2019. “A Study on Object Detection in Very High Resolution Satellite Images Using CNN”, Paper presented at the 50th KIEE Summer Conference 2019, Gangwon, Goseong: Delpinoresort, 1608-1609. -
이수기·고준호·이기훈, 2016. “근린환경특성이 보행만족도에 미치는 영향 분석: 서울서베이 2013년 자료를 중심으로”, 「국토계획」, 51(1): 169-187.
Lee, S.G., Ko, J.H., and Lee, G.H., 2016. “An Analysis of Neighborhood Environment Affecting Walking Satisfaction: Focused on the Seoul Survey 2013”, Journal of Korea Planning Association, 51(1): 169-187. [ https://doi.org/10.17208/jkpa.2016.02.51.1.169 ]
-
이수기·이윤성·이창관, 2014. “보행자 연령대별 보행만족도에 영향을 미치는 가로환경의 특성분석”, 「국토계획」, 49(8): 91-105.
Lee, S.G., Lee, Y.S., and Lee, C.K., 2014. “An Analysis of Street Environment Affecting Pedestrian Walking Satisfaction for Different Age Groups”, Journal of Korea Planning Association, 49(8): 91-105. [ https://doi.org/10.17208/jkpa.2014.12.49.8.91 ]
-
이제승·이현희, 2019. “기계학습 알고리즘을 이용한 보행만족도 예측모형 개발”, 「국토계획」, 54(3): 106-118.
Lee, J.S. and Lee, H.H., 2019. “Developing a Pedestrian Satisfaction Prediction Model Based on Machine Learning Algorithms”, Journal of Korea Planning Association, 54(3): 106-118. [ https://doi.org/10.17208/jkpa.2019.06.54.3.106 ]
-
이호준·이수기, 2019. “생활도로 노상주차 식별을 위한 Google Street View API와 딥러닝 모형의 적용”, 「대한공간정보학회지」, 27(2): 3-12.
Lee, H.J. and Lee, S.G., 2019. “Application of Google Street View API and Deep Learning for Detection of Street Parking on Community Road”, Journal of Korean Society for Geospatial Information Science, 27(2): 3-12. [ https://doi.org/10.7319/kogsis.2019.27.2.003 ]
-
정연희, 2009. “환경특성과 보행행태 분석에 근거한 보행공간 연구”, 성균관대학교 디자인대학원 석사학위논문.
Jung, Y.H., 2009. “A Study for Pedestrian Space Based on Analysis of Environmental Features and Pedestrian Behavior”, Master’s Degree Dissertation, Graduate School of Design, Sungkyunkwan University. -
지우석·구연숙·좌승희, 2008. “보행환경 만족도 연구”, 경기도: 경기개발연구원.
Ji, O.S., Koo, Y.S., and Jwa, S.H., 2008. “A study on Satisfaction for Pedestrian Environment”, Gyeonggi: Gyeonggi Research Institute. -
Ammar, A., Koubaa, A., Ahmed, M., and Saad, A., 2019. “Aerial Images Processing for Car Detection Using Convolutional Neural Networks: Comparison between Faster R-CNN and YOLOv3”, arXiv preprint arXiv:1910.07234.
[https://doi.org/10.20944/preprints201910.0195.v1]
-
Berto, R., 2005. “Exposure to Restorative Environments Helps Restore Attentional Capacity”, Journal of Environmental Psychology, 25(3): 249-259.
[https://doi.org/10.1016/j.jenvp.2005.07.001]
- Buduma, N. and Locascio, N., 2017. Fundamentals of Deep Learning: Designing Next-Generation Machine Intelligence Algorithms, O’Reilly Media.
-
Chen, L.C., Papandreou, G., Kokkinos, I., Murphy, K., and Yuille, A.L., 2017. “Deeplab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution, and Fully Connected Crfs”, IEEE Transactions on Pattern Analysis and Machine Intelligence, 40(4): 834-848.
[https://doi.org/10.1109/TPAMI.2017.2699184]
- Fruin, J.J., 1971. Pedestrian Planning and Design, New York: Metropolitan Association of Urban Designer and Environmental Planner.
-
Hao, S., Zhou, Y., and Guo, Y., 2020. “A Brief Survey on Semantic Segmentation with Deep Learning”, Neurocomputing, 406: 302-321.
[https://doi.org/10.1016/j.neucom.2019.11.118]
- Jacobs, J., 1961. The Death and Life of Great American Cities, New York: Random House.
-
Kim, S., Park, S., and Lee, J.S., 2014. “Meso-or Micro-scale Environmental Factors Influencing Pedestrian Satisfaction”, Transportation Research Part D: Transport and Environment, 30: 10-20.
[https://doi.org/10.1016/j.trd.2014.05.005]
-
Liu, J. and Zhang, D., 2020. “Research on Vehicle Object Detection Algorithm Based on Improved YOLOv3 Algorithm”, Journal of Physics: Conference Series, 1575(1): 012150.
[https://doi.org/10.1088/1742-6596/1575/1/012150]
-
Liu, P., Liu, X., Liu, M., Shi, Q., Yang, J., Xu, X., and Zhang, Y., 2019. “Building Footprint Extraction from High-resolution Images via Spatial Residual Inception Convolutional Neural Network”, Remote Sensing, 11(7), 830: 1-19.
[https://doi.org/10.3390/rs11070830]
-
Lu, Y., 2019. “Using Google Street View to Investigate the Association between Street Greenery and Physical Activity”, Landscape and Urban Planning, 191, 103435.
[https://doi.org/10.1016/j.landurbplan.2018.08.029]
-
Lu, Y., Sarkar, C., and Xiao, Y., 2018. “The Effect of Street-level Greenery on Walking Behavior: Evidence from Hong Kong”, Social Science & Medicine, 208: 41-49.
[https://doi.org/10.1016/j.socscimed.2018.05.022]
-
Middel, A., Lukasczyk, J., Zakrzewski, S., Arnold, M., and Maciejewski, R., 2019. “Urban Form and Composition of Street Canyons: A Human-centric Big Data and Deep Learning Approach”, Landscape and Urban Planning, 183: 122-132.
[https://doi.org/10.1016/j.landurbplan.2018.12.001]
- Mun, S., Nguyen, M.D., Kweon, S., and Bae, Y.H., 2019. “Deep Learning Object Detection to Clearly Differentiate Between Pedestrians and Motorcycles in Tunnel Environment Using YOLOv3 and Kernelized Correlation Filters”, Journal of Broadcast Engineering, 24(7): 1266-1275.
-
Nagata, S., Nakaya, T., Hanibuchi, T., Amagasa, S., Kikuchi, H., and Inoue, S., 2020. “Objective Scoring of Streetscape Walkability Related to Leisure Walking: Statistical Modeling Approach with Semantic Segmentation of Google Street View Images”, Health & Place, 66, 102428: 1-11.
[https://doi.org/10.1016/j.healthplace.2020.102428]
-
Naik, N., Philipoom, J., Raskar, R., and Hidalgo, C., 2014. “Streetscore-predicting the Perceived Safety of One Million Streetscapes”, Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, 779-785.
[https://doi.org/10.1109/CVPRW.2014.121]
-
Noble, W.S., 2006. “What is a Support Vector Machine?”, Nature Biotechnology, 24(12): 1565-1567.
[https://doi.org/10.1038/nbt1206-1565]
- Oh, I.S., 2017. Machine Learning, Hanbit Academy, 194-221.
-
Quercia, D., O’Hare, N.K., and Cramer, H., 2014. “Aesthetic Capital: What Makes London Look Beautiful, Quiet, and Happy?”, Proceedings of The 17th ACM Conference on Computer Supported Cooperative Work & Social Computing, 945-955.
[https://doi.org/10.1145/2531602.2531613]
- Roth, M., 2005. “Online Visual Landscape Assessment Using Internet Survey Techniques Trends in Online Landscape Architecture“, Paper presented at the Anhalt University of Applied Sciences, 121-130.
-
Schroeder, H.W. and Anderson, L.M., 1984. “Perception of Personal Safety in Urban Recreation Sites”, Journal of Leisure Research, 16(2): 178-194.
[https://doi.org/10.1080/00222216.1984.11969584]
-
Stradling, S.G., Anable, J., and Carreno, M., 2007. “Performance, Importance and User Disgruntlement: A Six-step Method for Measuring Satisfaction with Travel Modes”, Transportation Research Part A: Policy and Practice, 41(1): 98-106.
[https://doi.org/10.1016/j.tra.2006.05.013]
-
Valtchanov, D. and Ellard, C.G., 2015. “Cognitive and Affective Responses to Natural Scenes: Effects of Low Level Visual Properties on Preference, Cognitive Load and Eye-movements”, Journal of Environmental Psychology, 43: 184-195.
[https://doi.org/10.1016/j.jenvp.2015.07.001]
-
Wang, M. and Vermeulen, F., 2020. “Life Between Buildings from a Street View Image: What Do Big Data Analytics Reveal about Neighbourhood Organisational Vitality?”, Urban Studies.
[https://doi.org/10.1177/0042098020957198]
-
Wang, S.C., 2003. “Artificial Neural Network”, in Interdisciplinary Computing in Java Programming. Springer, Boston, MA. 81-00.
[https://doi.org/10.1007/978-1-4615-0377-4_5]
-
Wang, R., Lu, Y., Zhang, J., Liu, P., Yao, Y., and Liu, Y., 2019. “The Relationship Between Visual Enclosure for Neighbourhood Street Walkability and Elders’ Mental Health in China: Using Street View Images”, Journal of Transport & Health, 13: 90-102.
[https://doi.org/10.1016/j.jth.2019.02.009]
-
Yin, L. and Wang, Z., 2016. “Measuring Visual Enclosure for Street Walkability Using Machine Learning Algorithms and Google Street View Imagery”, Applied Geography, 76: 147-153.
[https://doi.org/10.1016/j.apgeog.2016.09.024]
- Yuan, Y., Chen, X., and Wang, J., 2019. “Object-contextual Representations for Semantic Segmentation”, arXiv preprint arXiv:1909.11065.
-
Zhang, F., Zhou, B., Liu, L., Liu, Y., Fung, H.H., Lin, H., and Ratti, C., 2018. “Measuring Human Perceptions of a Large-scale Urban Region Using Machine Learning”, Landscape and Urban Planning, 180: 148-160.
[https://doi.org/10.1016/j.landurbplan.2018.08.020]