Final publication date 01 Aug 2019
자율주행 공유 자동차 도입에 따른 서울시 주차수요 변화 예측
Abstract
Autonomous vehicle technology, which has been rapidly developed in recent years, is expected to greatly change urban parking demand in particular when autonomous vehicles are used as shared cars. However, few studies have focused on investigating the potential parking demand changes incurred by the shared autonomous vehicles (SAVs). Under this background, this study attempts to compute the required fleet size of SAVs to provide transportation services for some portions of passenger car travel demand in Seoul and estimate the resultant parking demand changes based on a simulation approach. For this purpose, 20 scenarios are established by varying fleet size and relocation strategy of SAVs. The scenario-based analyses identify that the required SAV fleet size is 5,000 for both 3km and 5km relocation strategies when the SAV market penetration rate is 10%. The model with assumptions of 5,000 SAVs deployed and a 5km relocation strategy shows the greatest reduction in parking demand, which is equivalent to 271 vehicle-hours per day. In addition, the wider relocation strategy implies tradeoffs between operational efficiency and travel distances with no passenger. Although models with a 5km relocation strategy show greater reductions of parking demand and waiting time, they suggest travel distances with no passenger can be longer due to the relocation of SAVs over longer distances.
Keywords:
Shared Autonomous Vehicle, Parking Demand, Simulation, Required Fleet Size키워드:
자율주행 공유 자동차, 주차수요, 시뮬레이션, 적정보급 대수Ⅰ. 서 론
1. 연구의 배경 및 목적
최근 자동차의 자율주행 기술은 급속도로 발전하고 있으며, 자율주행 기술의 일부인 주차 보조나 크루즈 컨트롤, 충돌 방지 등은 이미 상용화되어 활용되고 있다. 이와 함께, 구글, 테슬라, BMW, 닛산, 볼보 등을 포함하는 주요 자동차 회사들이 2020년까지 인간의 개입 없이 안정적으로 주행할 수 있는 완전 자율주행 자동차의 상용화를 발표하였으며, 현재 실제 도로에서 시범 주행을 하고 있는 단계이다.
자율주행 자동차의 도입은 교통사고, 교통 체증, 여행행태, 차량의 소유와 주차 등 여러 분야에 걸쳐 도시공간에 지대한 영향을 미칠 것으로 예상된다. 하지만 완전 자율주행 자동차에 대한 연구는 대부분 자율 주행 기술의 측면에서 다뤄지고 있으며(Milakis et al., 2017), 자율주행차의 도입이 도시공간에 미칠 영향에 대해 다루는 연구는 매우 소수이다. 또한, 자율주행 차량이 도시공간에 미칠 영향을 다루는 연구들은 대부분 가상의 격자형 도시공간을 대상으로 하고 있다는 한계점을 가지며, 자율주행 자동차의 보급이 도시 주차수요에 미칠 영향에 대해 정량적 분석을 수행한 연구는 상대적으로 부족한 실정이다.
이러한 배경에서, 본 연구는 서울시를 대상으로 자율주행 공유 자동차(Shared Autonomous Vehicle: SAV) 운행 시뮬레이션 모형을 구축하여 분석함으로써, 자율주행 공유 자동차의 적정보급 대수를 파악하고, 자율주행 공유 자동차의 도입이 서울시의 주차수요에 전역적으로 미치는 영향을 시뮬레이션하고자 한다.
2. 연구 질문
주차 공간의 부족은 시민들의 불편함을 초래할 뿐만 아니라, 불법 노상 주차를 야기해 교통 안전, 보행 환경, 긴급 차량의 소통 등에 부정적 영향을 미치는 서울시의 대표적인 도시 문제이다. 서울시는 주차 공간의 부족으로 발생하는 문제를 해결하기 위해 거주자 우선주차제도, 대중교통 이용 장려, 주차공간 공유에 대한 정책을 적극적으로 발굴하고 시행 중에 있다.
한편, 자율주행 공유 자동차가 점차적으로 도입됨에 따라 차량의 소유가 감소할 것으로 예상되며, 이는 주차수요에 직접적으로 영향을 미칠 것으로 판단된다. 이러한 영향 정도는 자율주행 공유 자동차의 보급 대수, 승객들의 수단 선호도에 따라 변화할 것이며, 자율주행 공유 자동차의 운영방식(승객탐색 거리, 통행 수요가 없을 경우 재배치 방식 등)에 따라서도 변화할 것으로 예상된다. 따라서 본 연구는 자율주행 자동차에 대한 시뮬레이션 모형을 구축하여, 자율주행 공유 자동차가 주차수요 변화에 미칠 영향을 정량적으로 예측하는 것을 목적으로 한다.
본 연구의 주요 연구 질문은 다음과 같다. 첫째, 자율주행 공유 자동차의 도입은 서울시 주차수요를 얼마나 감소시킬 수 있는가? 둘째, 주차수요 감소의 측면에서 서울시 자율주행 공유 자동차의 최적 보급 대수는 몇 대 인가? 셋째, 자율주행 공유 자동차의 대수, 자율주행 공유 자동차의 재배치 전략 등이 변할 때, 주차수요 감소 효과와 최적 보급대수는 어떻게 변화하는가?
Ⅱ. 선행연구 고찰
1. 자율주행 자동차의 영향
자율주행 자동차의 출현은 도시 교통 체계 및 도시 공간 활용, 그리고 도시민의 행태에 큰 영향을 미칠 것으로 예상된다. Milakis et al.(2017)은 이러한 자율주행 자동차의 출현의 영향을 단계적 영향모형인 리플 모형을 통해 개념화하여 제시하였다. 이들은 자율주행 자동차로 인해 1차적으로 도로의 도로 용량, 여행비용 등이 변화하고, 이로 인한 파급효과로 인해 자가용의 소유, 목적지 선택, 토지이용 등 도시민들의 행태에 영향을 미쳐, 최종적으로 에너지 소비, 대기 오염, 교통 안전, 사회적 형평성, 경제, 공중 보건 등이 변화할 것으로 예상하였다. 이와 같은 맥락에서, Fagnant and Kockelman(2015)은 자율주행 자동차 기술이 교통안전, 교통 체증 및 교통 운영, 도시민의 통행행태, 차량 소유와 주차감소, 화물 운송 등의 측면에서 영향을 미칠 것으로 예측하였다. 이들은 자율주행 자동차의 영향을 경제적 가치로 산출하여, 자율주행 자동차의 보급률에 따라 연간 376억 달러(보급률 10%)에서 4,347억 달러(보급률 90%)정도의 경제적 이익을 줄 것으로 예측하였다.
이러한 배경에서 다양한 분야에서 자율주행 자동차의 영향을 예측 분석하는 연구들이 수행되고 있다. 다수의 연구들은 자율주행 자동차 출현으로 인해 직접적, 단기적으로 영향을 받을 수 있는 도로용량 및 교통체증, 그리고 통행시간 등 통행비용에 초점을 맞추고 있다(Hoogendoorn et al., 2014; Arnaout and Arnaout, 2014; 박인선 외, 2015; 정승원 외, 2017; 고용석 외, 2017). 이러한 연구들은 상이한 운전자 특성이 개입되지 않고, 주어진 교통상황에 가장 적절한 주행 속도로 주행할 수 있는 등의 자율주행 자동차의 주행 특성으로 인해 도로용량이 증가하여 도로혼잡이 완화되고 통행속도가 증가할 것으로 보고 있다.
한편, 몇몇 연구들은 자율주행 자동차의 출현으로 인한 도시민들의 행태 변화를 가정하고 총 주행거리(Fagnant and Kockelman, 2015; Childress et al., 2015; Martinez and Crist, 2015), 자동차 소유(Fagnant and Kockelman, 2014, 2015; Zhang et al., 2015; Chen et al., 2016; Boesch et al., 2016; Zhang and Guhathakurta, 2017), 환경(Fagnant and Kockelman, 2014), 교통안전(Fagnant and Kockelman, 2015; 고용석 외, 2017) 등의 측면에서 나타날 변화를 예측하였다. 하지만 위와 같은 연구들은 자율주행 자동차의 기술수준, 도시민의 자율주행 자동차 이용 의지 및 통행 선택 등과 같은 도시민의 행태에 대한 가정의 정교성이 부족하며, 연구의 수도 부족한 실정이다. Milakis et al.(2017)은 위와 같은 한계점으로 인해, 아직 여러 측면에서 자율주행 자동차의 영향이 긍정적일지 부정적일지, 그리고 영향의 크기가 어느 정도일지가 명확하지 않다는 점을 언급하며 추후 다양한 연구가 후속되어야함을 시사했다.
2. 자율주행 자동차와 자가용 소유
자가용 소유는 주차수요와 밀접한 연관성을 가지는 지표이며, 다수의 연구에서 자율주행 차량의 도입이 차량의 공유를 촉진하고 차량 소유를 감소시킬 것으로 전망한다(Fagnant and Kockelman, 2014, 2015; Zhang et al., 2015; Martinez and Crist, 2015; Chen et al., 2016; Boesch et al., 2016; Zhang and Guhathakurta, 2017). 이는 자율주행 차량은 운전자의 개입이 없이 운행이 가능하기 때문에 운전과 관련된 스트레스를 완전히 제거해 양질의 이동성 서비스를 제공할 가능성이 높은 반면, 고가의 차량가격이 예상되기 때문에 차량의 소유보다는 공유를 통한 이용이 활발할 것으로 예상되기 때문이다. 위와 같은 연구들은 자율주행 차량이 개인의 자동차 소유를 감소시켜 주차수요의 감소에 영향을 미칠 수 있다는 시사점을 간접적으로 제공하고 있다고 볼 수 있다.
Chen et al.(2016)은 가상의 격자형 도시를 대상으로 2009년 NHTS(National Household Travel Survey)자료 및 행위자기반모형을 활용하여 자율주행 전기 자동차의 운행을 시뮬레이션 하였다. 연구 결과, 자율주행 자동차는 차량의 배터리 용량과 충전시설의 질에 따라 3.7~6.8대의 자가용을 대체할 수 있는 것으로 나타났다. 이와 같은 맥락에서 Boesch et al.(2016)은 스위스 취리히 대도시권을 대상으로 다양한 통행수요 시나리오별 적정 자율주행 자동차 대수를 산정하였다. 이들은 통행수요와 공급되는 자율주행 자동차 대수에 따라, 총 140개 시나리오를 분석하였다. 분석 결과 전체 통행수요의 10%를 자율주행 자동차로 전환할 때, 자율주행 자동차 1대당 26.9통행을 수행하며, 이를 통해 10대의 일반 자가용을 대체할 수 있음을 확인하였다. 또한, 이들은 자율주행 자동차를 이용하는 통행이 전체 통행수요의 10%일 때는 1대가 10대의 일반 자가용을 대체할 수 있지만, 1%일 때는 1.5대의 자율주행차가 10대의 일반 자가용을 대체하는 것을 확인하여 자율주행 자동차로 전환되는 통행수요의 양과 적정 자율주행 자동차 대수 간에 비선형적인 양의 상관관계가 있음을 밝혔다. 이러한 연구들은 자율주행 차량으로 인해 차량소유가 줄어드는 것을 밝혀, 이를 통해 주차수요가 감소할 것을 추론할 수 있는 근거를 제공하고 있으나, 그 감소규모를 정량적으로 제시하고 있지는 못하는 한계점을 가진다.
3. 자율주행 자동차와 카쉐어링
자율주행 차량은 차량의 공유를 활성화 시켜 차량소유와 주차수요를 감소시킨다는 점에서 기존 카쉐어링 서비스와 공통점을 가진다. 카쉐어링 서비스는 개인 차량을 미소유한 시민들의 이동성을 제고하며, 그와 동시에 많은 연구들이 카쉐어링 서비스의 주요 영향으로 차량소유 및 주차수요 감소를 제시하고 있다(박준식·문지혜, 2013; 황기연 외, 2013; 고준호·유경상, 2013; Shaheen and Cohen, 2013; 서지민·석종수, 2017).
Shaheen and Cohen(2013)은 유럽, 북미, 호주를 대상으로 카쉐어링의 도입효과를 다룬 선행연구들을 종합적으로 검토한 결과, 보유 차량을 매각하거나 차량 구매를 보류함으로써 카쉐어링 차량 1대당 4~13대의 개인 차량을 대체하는 것을 확인하였다. 한편, 국내 연구로는 박준식·문지혜(2013)의 연구에서 카쉐어링 서비스의 잠재적 수요계층을 대상으로 한 설문조사를 활용하여 차량소유 감소효과를 포함한 카쉐어링 서비스의 도입효과를 분석하였다. 분석 결과, 이들은 잠재적 카쉐어링 서비스 이용자들이 보유하던 차량을 매각하거나 차량 구매를 보류함으로써 약 6만 8천대의 카쉐어링 차량을 공급해 약 80만대의 차량 소유를 감소시킬 수 있을 것으로 예측하였다.
하지만, 이러한 공통점에도 불구하고 자율주행 차량과 카쉐어링 서비스는 이용 행태의 측면에서 차이를 보이며, 이로 인해 주차수요에 미치는 영향은 상이할 것으로 판단된다. 두 서비스의 대표적 차이는 공유 차량으로의 접근성이다. 자율주행 공유 차량 서비스의 경우, 승객의 출발지로 차량이 이동 형태로 이뤄지기 때문에 승객이 서비스를 이용하기 위해 이동할 필요가 없을 것으로 예상되지만, 카쉐어링은 승객이 정해진 카쉐어링 주차장으로 이동해서 이용해야하며 이용을 마친 후에는 다시 정해진 정류장에 차량을 반납해야한다. 이러한 차량접근성의 차이로 인해 자율주행 공유 차량과 카쉐어링 서비스 간에는 서비스 이용률과 차량 소유 감소에 차이가 있을 것으로 판단된다.
여러 선행연구들에서 공유 차량으로의 접근성이 높을수록 차량 소유 감소효과가 크다는 것을 보여주고 있으며(Cervero et al., 2007; De Luca and Di Pace, 2015; Ko et al., 2019), 자율주행 공유 차량의 높은 접근성은 차량 소유 감소에 영향을 미칠 것으로 보인다. 또한, 운영의 측면에서 카쉐어링 서비스는 다음 손님의 이용까지 지정된 주차장에 오직 주차된 상태로 대기하지만, 자율주행 공유 차량은 다음 손님 탑승을 위한 이동, 통행수요를 반영한 재배치 등을 위한 이동이 포함되어 있어 공유 차량이 발생시키는 주차수요에도 차이가 있을 것으로 보인다.
4. 자율주행 자동차와 주차수요
자율주행 자동차가 주차수요에 미칠 영향을 정량적으로 분석한 연구는 매우 드물다. 먼저, Fagnant and Kockelman(2015)은 자율주행 자동차의 출현으로 인한 변화의 경제적 가치를 산정하는 과정에서 주차수요 측면에서 경제적 이익을 고려하였다. 이들은 자율주행 자동차가 지대가 비싼 CBD 및 도시에 주차하는 대신 비교적 지대가 싼 교외로 이동하여 주차할 수 있기 때문에 주차 요금이 줄어들 것으로 보았다. 또한, 차량을 소유하지 않고 필요시에만 공유하여 사용함으로써 도시의 차량 대수가 감소하기 때문에 주차수요가 감소할 것이며, 이 두 가지 사안을 고려할 때, 자율주행 자동차는 주차 측면에서 한 대당 약 250달러의 경제적 이익이 있다고 가정하였다. 이 연구는 주차 측면에서 자율주행 자동차의 영향을 고려하였다는 점에서 의의가 있지만, 주차수요에 초점을 맞춘 연구가 아니며, 자율주행차의 대수, 이용자 수 등을 고려하지 않고 단순히 자율주행 차량 1대당 주차로 인한 경제적 이익을 일괄적으로 적용했다는 한계가 있다.
Fagnant and Kockelman(2014)은 가상의 격자형 도시에 행위자 기반모형을 활용해 자율주행 자동차의 환경적 영향에 대해 분석하였다. 이들은 자율주행 자동차의 환경적 영향을 총 주행거리의 변화, cold-starts의 감소, 그리고 차량 공유로 인한 주차장 감소를 통해 도출하였다. 이 연구는 시뮬레이션 결과에서 자율주행차가 대체한 통행 수와 자가용 운전자의 하루 평균 자가용 통행횟수, 그리고 운전자당 평균 자가용 소유 대수를 통해 자율주행차로 대체할 수 있는 자가용 대수를 역산하였으며, 대체된 자가용 1대당 1개의 주차공간을 제거할 수 있다고 가정하여 주차수요 감소를 계산하였다. 분석 결과 자가용 통행의 3.5%가 자율주행차를 이용할 때, 자율주행차 1,688대로 19,849대의 자가용을 대체할 수 있으며, 이로 인해 19,849개의 주차공간을 줄일 수 있음을 확인하였다. 하지만, 이들의 연구는 자율주행 자동차의 환경적 영향을 파악하는데 초점을 맞추고 있으며, 감소된 주차공간의 공간적 분포를 설명하지 못하고 있다. 이러한 측면에서 자율주행 자동차로 인한 주차수요 감소의 공간적 분포를 살펴본 Zhang et al.(2015)의 연구는 주목할 만하다. 이들은 Fagnant and Kockelman(2014)의 모델을 참고하여 시뮬레이션 모형을 구축하여 자율주행 자동차가 주차수요에 미치는 영향을 파악하였다. 자율주행 차량의 보급 대수, 승객들의 합승 의지, 공차 주행 정책 등을 변화시키며 주차수요 변화를 시뮬레이션 한 결과, 수단전환율 2%를 가정하였을 때, 주차수요를 90%까지 줄일 수 있는 것을 확인하였으며, 주차수요 변화의 공간적 분포를 제시하였다. 하지만, Zhang et al.(2015)의 연구는 활용 자료 및 모형의 알고리즘, 주차수요 변화의 산출방식 등에서 Fagnant and Kockelman(2014)의 방법론에 기반하고 있으며, 이에 따라 실제 도시가 아닌 가상의 격자 도시를 대상으로 하여 모든 대상지의 링크 및 노드가 같다는 동일한 한계점을 가진다.
비교적 최근 이루어진 Martinez and Crist(2015)와 Zhang and Guhathakurta(2017)의 연구는 가상 공간이 아닌 실제 도시를 대상으로 실제 도로 네트워크를 활용하여 자율주행 자동차가 주차수요에 미치는 영향을 분석하였다. 먼저 Martinez and Crist(2015)는 유럽의 중규모 도시를 대표할 수 있는 포르투갈 리스본을 대상으로 자율주행 자동차의 영향을 여러 가지 측면에서 분석하였다. 주요 자료로는 리스본의 통행설문조사 자료를 활용하였으며, 자율주행 자동차 수단분담률, 자율주행 자동차의 합승(ride sharing)가능 여부, 대중교통 시설 유무를 변화시키며 총 8개의 시나리오를 분석하였다. 분석결과 기존 자가용대수의 10%정도로 전체 통행수요의 80~90%를 충족시킬 수 있으며, 이를 통해 리스본 주차수요를 최대 현재의 5.6%수준까지 줄일 수 있음을 확인하였다.
Zhang and Guhathakurta(2017)는 미국 조지아(Georgia)주 아틀란타(Atlanta)시를 대상으로 주차요금 정책 변화에 따른 총 주행거리, 고객 대기시간, 주차수요 감소 등을 분석하였다. 분석 결과 자율주행 자동차 1대당 약 20개의 주차공간을 제거할 수 있으며, 아틀란타시 거주민 중 5%가 자가용을 포기하고 자율주행 자동차를 이용할 때, 주차수요가 현재의 4.5%까지 감소하는 것으로 나타났다. 두 연구는 실제 도시공간을 대상으로 각 도시별 통행설문조사를 주요 자료로 사용하고 있다. 통행설문조사 자료는 응답자의 개별통행 단위로 통행출발지, 목적지, 출발시간, 도착시간, 수단 등을 파악할 수 있는 자료이다. 하지만 동시에 높은 조사비용으로 인해 일반적으로 수년에 한 번씩 조사되어 시계열적 자료를 구득하기 힘들고, 조사의 공간적 범위 및 샘플 수 등에 한계를 가질 수 있다.
이러한 배경에서 본 연구는 다음과 같은 차별성을 가진다. 먼저, 자율주행 자동차가 주차수요에 미치는 영향에 대한 연구는 매우 부족한 실정이다. 많은 연구들이 주차수요와 연관성이 있는 자가용 소유의 측면에서 연구가 이루어지고 있지만 주차수요 감소 규모를 정량적으로 산정한 연구는 매우 드물다. 추가적으로, 자율주행 자동차 운행으로 인한 주차수요 감소를 산정함에 있어 자율주행 자동차의 통행발생 대기 및 충전으로 인한 주정차를 고려하여, 실질적인 주차수요 감소를 산출하였다는 것도 본 연구의 차별성으로 들 수 있다. 또한, 선행연구들에서는 분석 대상을 가상의 도시 혹은 중간규모 도시로 설정한 반면, 본 연구는 분석의 공간적 범위를 세계적 대도시 중 하나인 서울특별시로 설정하였다. 마지막으로, 주요 연구 자료로서 수도권 수단 기종점 통행자료(Origin/Destination: O/D) 및 네트워크 자료를 활용하여 행정동간 자동차 통행량을 산정하였다. 이는 서울시의 실제 통행행태를 반영하면서도 통행설문 표본 조사에 비해 자료의 구득이 더욱 용이하다는 장점이 있다.
Ⅲ. 연구방법
1. 연구의 범위 및 자료
본 연구의 공간적 범위는 서울시 424개 행정동이며, 이에 따라 서울시 내부 통행만을 고려하여 분석하였다. 서울시 행정동 단위로 자율주행 공유 자동차 도입에 따른 효과를 산정하기 위한 시뮬레이션 모형의 입력 데이터로는 서울시 행정동 간 통행량, 통행거리 및 통행시간을 사용하였다.
먼저, 서울시 행정동간 통행량 데이터는 한국교통연구원 국가교통DB(KTDB)의 수도권 교통분석 기초자료인 “2015년도 기준 수도권 O/D 및 네트워크”를 활용하여 산출하였다. 배포되는 기초자료는 일반적으로 수단별 O/D와 목적별 O/D로 구분할 수 있다. 본 연구에서는 주차수요가 발생하는 자가용 통행에서 자율주행 공유 차량으로의 수단전환을 분석하기 위해 평일 통행량을 기반으로 생성된 수단별 O/D를 사용하였다.
“2015년도 기준 수도권 O/D 및 네트워크” 자료는 시간대별 통행량에 대한 정보를 제공하고 있지 않기 때문에, 행정동간 시간대별 통행량을 구축하기 위해 서울시 도시교통본부에서 제공하는 통계자료인 “2016 서울특별시 교통량 조사자료”를 활용하였다. 다시 말하면, “2015년도 기준 수도권 수단 O/D 및 네트워크”에서 제공하는 수도권 행정동 간 자동차 일일 평균 통행발생량에 “2016 서울특별시 교통량 조사자료”의 시간대별 교통량 비율을 적용하여 시간대별 서울시 행정동간 자동차 통행발생량을 산출하였다.
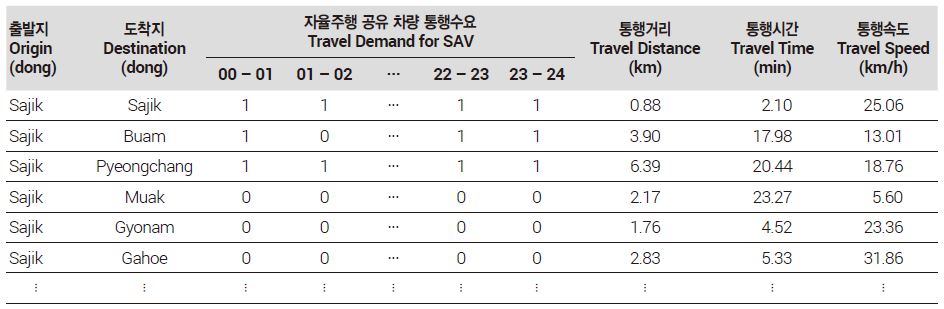
다음으로, 시뮬레이션 분석에서 사용한 서울시 행정동 간 통행거리와 통행시간은 KTDB의 “2015년도 기준 수도권 수단 O/D 및 네트워크”를 입력자료로 활용하여 교통수요분석 패키지인 EMME/2를 통해 산출하였다. EMME/2는 교통량 정산 및 장래통행량 산정 등을 목적으로 사용되는 대표적인 패키지이며, 교통량을 산정하는 과정에서 행정동간 통행거리와 시간을 산출할 수 있다. <표 1>은 분석에 활용된 서울시 내부통행량, 행정동 간 통행거리 및 통행시간 등을 예시로 정리한 자료이다.

Example of input data
2. 분석 모형 설정
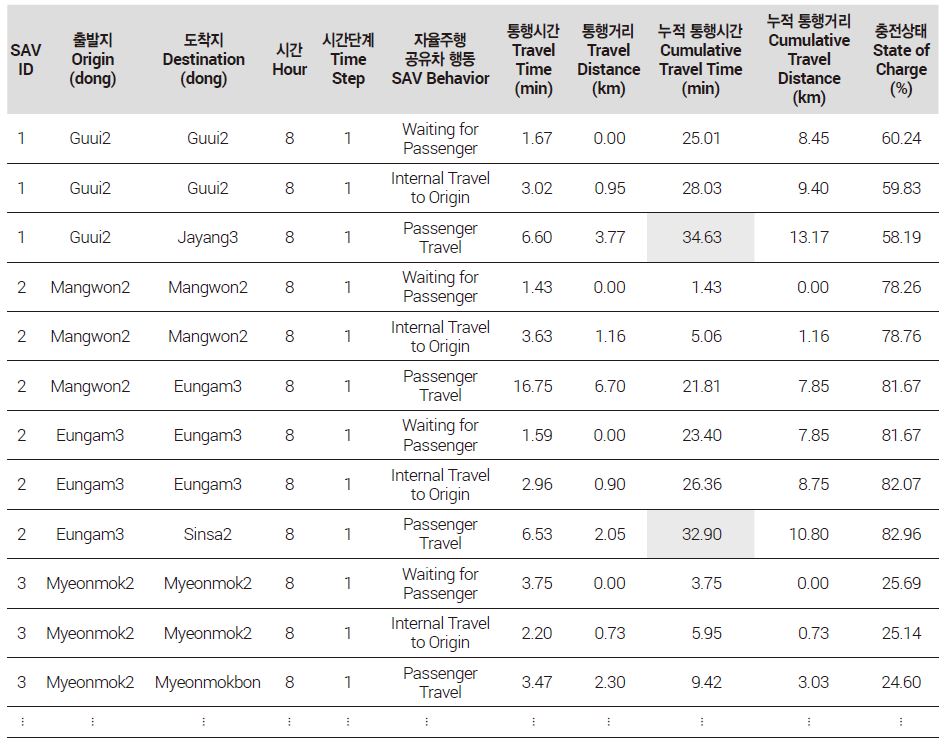
본 연구에서 사용한 시뮬레이션 모형은 R 3.3.1 소프트웨어를 기반으로 코딩하였으며, 30분의 시간 단계(time step)단위로 운행하게 된다. 하지만 자율주행 자동차 행동의 연속성을 고려하여 시간 단계별 행동 시간을 정확하게 30분으로 제한하지 않고, 행동을 마친 시점에서 해당 시간 단계의 총 행동시간이 30분을 초과할 시 다음 자율주행 자동차가 행동하도록 설정하였다. 모든 자율주행 자동차가 해당 시간 단계에서 행동시간이 30분을 초과하면, 다음 시간 단계에서 1번 자율주행 자동차부터 다시 행동을 시작한다. 시뮬레이션 모형의 구현 방식의 예는 아래 <표 2>와 같다. <표 2>에서 1번 ID의 자율주행 자동차가 시간 단계 1에서 총 행동시간 30분을 초과(34.63분)하여, 2번 ID의 자율주행 자동차가 행동하는 것을 확인할 수 있다. 같은 맥락에서 2번 ID의 자율주행 자동차가 시간 단계 1에서 총 행동시간이 32.90분으로 30분을 초과한 후, 3번 ID의 자율주행 자동차가 행동하는 것을 볼 수 있다. 모형의 입력 데이터로는 “2015년도 기준 수도권 O/D 및 네트워크” 및 “2016 서울특별시 교통량 조사자료”의 시간대별 교통량 비율을 적용하여 산출한 시간대별 서울시 행정동 간 통행량, 그리고 EMME/2를 활용해 산출한 행정동 간 통행거리 및 통행시간을 사용하였다.
Example of model result
본 연구에서 사용한 시뮬레이션 모형의 구동을 위해 아래와 같은 가정을 설정하였다. 먼저, 본 연구에서는 선행연구들을 참고하여, 분석 데이터의 행정동 간 자가용 통행량 중 10%가 자가용을 포기하고 자율주행 공유 자동차로 통행수단을 변경하는 것으로 가정하였다. 자율주행 공유차 이용에 대한 데이터 없이 자율주행 공유차를 이용하고자하는 통행수요를 추정하는 것은 매우 제한적이며, 이에 따라 대부분의 선행 연구에서는 이를 추정하는 대신 일정 수요를 가정하고 시뮬레이션 분석을 진행하였다. 예로, Fagant and Kockelman(2014)은 전체 통행의 3.5%, Chen et al.(2016)은 자동차 통행의 10%가 자율주행 자동차 수요로 전환된다고 가정하였으며, Zhang and Guhathakurta(2017)는 전체 인구중 5%가 자가용을 포기하고 자율주행 공유 차량을 이용하는 것으로 가정하였다. 추가적으로 Boesch et al.(2016)와 Martinez and Crist(2015)는 각각 전체 통행의 1~10%, 50~100%가 자율주행 차량 통행으로 전환된다고 가정하고, 시뮬레이션 분석을 진행하였다.
다음으로, 분석 시작 시점에서 자율주행 자동차의 위치는 서울시 행정동 424개 중 무작위로 지정된다. 시뮬레이션의 모든 자율주행 자동차는 전기 자동차로 가정한다. 전기 자동차의 성능은 고준호 외(2017)을 참고하여 2021년에서 2025년 사이 보급이 이루어지고, 실 주행거리가 230km로 예상되는 2세대 전기 자동차로 설정하였다. 이에 따라 자율주행 자동차는 최종 충전 후 230km이상 주행했을 시 충전이 필요하며, 자율주행 자동차의 충전 상태(state of charge)는 모형 분석의 시작 시점에서 0~100%로 무작위로 지정된다. 이 때, 충전상태 0%라는 것은 최종 충전 후 주행거리가 230km가 되어 즉시 재충전이 필요한 상태이며, 100%는 최종 충전 후 주행하지 않은 상태를 나타낸다. 충전은 전기 자동차 충전소에서 이루어지며, 본 연구에서는 전기 자동차 충전소가 각 행정동에 1개씩 있다고 가정한다.
행정동 내부통행의 통행 거리는 Plaza and da Silva(2015)의 방법론을 적용하여 행정동 면적에 비례해 일괄적으로 적용하였으며 아래 식(1)과 같다.
| (1) |
식(1)에서 Idisti는 행정동 i의 내부통행 거리이며, Dareai는 행정동 i의 면적을 나타낸다.
내부통행 속도는 해당 행정동과 다른 모든 행정동 간 속도의 평균값을 사용하였으며, 식(2)와 같다.
| (2) |
식(2)에서 Ispdi는 행정동 i의 내부통행 속도이며, spdij는 행정동 i에서 행정동 i부터 행정동 j까지 통행속도를 나타낸다.
마지막으로, 첨두 시간의 교통정체를 고려하여 첨두시간 통행은 다른 시간대에 비해 추가적인 통행 시간이 소요되도록 가중치를 적용하였다. 이러한 가중치는 다음 지도를 활용해 산출한 평일 서울시 각 행정구로부터 고용중심지(서울시 중구 서울시청, 강남구 강남)까지의 통행시간 변화를 근거로 산출하였다. 오전 7~8시와 오후 17~18시에는 기존 행정동 간 통행시간에 1.25배, 오전 8~9시와 오후 18~19시에는 1.5배의 통행시간이 소요되도록 가중치를 적용하였다.
자율주행 공유 자동차 운행에 대한 시뮬레이션 모형을 구축하고, 앞서 설명한 입력 데이터를 통해 분석을 실시한다. 모형에서 정의하고 있는 자율주행 공유 자동차의 행동은 (1)충전을 위해 충전소로 이동하는 공차주행, (2)충전, (3)승객 발생 대기, (4)승객 탑승지로 이동을 위한 공차주행, (5)승객 탑승 후 목적지로의 여객통행, (6)자율주행 자동차의 재배치, (7) 해당지역에서 대기의 일곱 가지로 구분된다. 시뮬레이션 모형 내 자율주행 자동차의 행동 알고리즘은 <그림 1>와 같다.

Algorithm for depicting SAV behavior within the simulation model
먼저, (1)충전을 위해 충전소로 이동하는 공차주행, (2)충전은 충전과 관련된 자율주행 자동차의 행동이다. 본 연구에서 활용하는 시뮬레이션에서 자율주행 자동차는 여객통행을 수행하거나, 통행수요가 없어 자율주행차를 재배치 혹은 대기시키기에 앞서 해당 차량의 충전 상태를 확인한다. 충전 상태를 확인하였을 때, 최종 충전 이후 230km 이상 주행하여 충전상태가 0%이면 가장 가까운 전기 자동차 충전소로 이동하여 30분간 충전한다. 충전 후에는 자율주행 자동차의 충전상태는 100%가 된다.
충전 상태를 확인한 후, 자율주행 자동차가 위치한 행정동에 여객통행수요가 있으면 자율주행 자동차는 여객통행을 수행한다. 여객통행과 관련된 자율주행 자동차의 행동은 (3)승객 발생 대기, (4)승객 탑승지로 이동을 위한 공차주행, (5)승객 탑승 후 목적지로의 여객통행 세 가지로 구분할 수 있다. 승객 발생 대기는 해당 시간대의 남은 시간과 해당 행정동에 남은 발생 통행량을 고려하였을 때, 승객 발생까지 자율주행차가 평균적으로 대기하여야 하는 시간을 뜻하며 식(3)과 같이 산정할 수 있다.
| (3) |
식(3)에서 Wtimei는 자율주행차 i의 승객 발생 대기시간을 뜻하며 단위는 분이다. 다음으로 Rtimeij은 자율주행차 i가 j시간대에서 남은 시간을 뜻하며, 예로 대기 시작 시간이 5시 40분이라면 5시 시간대에서 20분이 남았다고 볼 수 있다. 마지막으로, Tdmdjk는 j시간대에 자율주행 자동차가 위치한 행정동 k에 남아있는 통행수요를 나타낸다. 예로, 5시 40분에 자율주행차가 위치하는 행정동에 5회의 통행수요가 존재한다면, 승객 발생 대기시간은 2분이 된다.
승객탑승을 위한 공차주행은 승객 발생 대기 후 여객통행을 위해 승객을 탑승시키기 위해 행정동 내에서 승객이 위치하는 지점까지 이동하는 것을 뜻한다. 본 연구에서는 공간 단위를 행정동으로 설정하고 있어 행정동 내부의 자율주행 자동차의 위치와 승객발생 위치를 정확히 파악할 수 없기 때문에, 승객발생 지점까지의 이동 거리 및 시간을 행정동 내부 통행 거리 및 시간으로 설정하였다. 여객통행은 분석 데이터의 시간대별 행정동 간 통행수요를 기반으로 자율주행 자동차가 위치한 행정동을 출발지로 하면서 통행수요가 가장 많은 행정동을 목적지로 설정하여 실시한다. 여객통행이 이루어지고 난 후에는 분석 데이터의 시간대별 행정동 간 통행수요에서 발생한 여객통행의 출발지에서 목적지로의 통행수요가 1통행 감소한다.
해당 시간대 자율주행 자동차가 위치한 행정동에 여객통행수요가 없을 경우 자율주행 자동차는 (6)재배치되거나 (7)다음 시간대까지 해당 행정동에서 대기하게 된다. 먼저, 자율주행 자동차가 위치한 행정동 3km 혹은 5km 이내에 위치한 행정동에서 통행수요가 있다면, 자율주행 자동차는 3km 이내에 위치한 행정동 중 가장 통행수요가 많이 남아있는 행정동으로 이동한다. 반면, 자율주행 자동차가 위치한 행정동 주변 3km 이내 행정동들에도 통행수요가 없을 경우 자율주행 자동차는 다음 시간대까지 해당 행정동에 대기한다.
3. 모형의 산출값
위와 같이 구축한 시뮬레이션 모형을 활용하여 자율주행 공유 자동차의 대수와 자율주행 공유 자동차의 재배치 전략을 파라미터로써 변화시켜, 다양한 시나리오 하에서 결과 값을 도출하였다. 이러한 분석의 1차적 결과 값으로 개별 자율주행 공유 차량의 행동 내역을 파악할 수 있으며, 이를 통해 차량별·행동별 이벤트 발생 횟수, 소요시간(통행, 대기, 충전 등), 통행 거리 등을 파악할 수 있다.
본 연구의 주요 관심사인 주차수요 감소는 자율주행 공유 자동차의 여객통행 정보를 활용해 측정한다. 개인 자가용을 활용해 통행을 하면, 도착한 시간부터 목적지를 떠날 때까지 주차수요가 발생한다. 반면, 자가용이 자율주행 공유 자동차로 수단이 전환되어 승객이 하차한 후에 주차하지 않고, 다른 지역으로 이동할 경우에는 해당 지역의 주차수요는 증가하지 않는다. 따라서 본 연구는 자율주행 공유 차량으로 대체된 자가용 통행의 수를 통해 주차수요의 감소를 산정하였다. 또한, 자율주행 공유 차량 서비스를 이용하지 못한 통행수요는 자가용에서 자율주행 공유 차량으로 수단전환이 이루어지지 않은 것으로 보고, 주차수요 감소에 포함시키지 않았다.
본 연구는 자율주행 공유 자동차로 인한 주차수요 감소 효과가 과대평가 되지 않도록, 다음과 같은 사항을 고려한다. 첫째, 해당 지역에 통행수요가 없어 자율주행 공유 자동차가 해당 지역에 대기하는 경우, 충전을 위해 주차해야하는 경우 등을 자율주행 공유 자동차 운영으로 인해 발생하는 추가 주차수요를 고려하였다. 『도로 교통법』에서 정의하는 주차 및 정차의 정의를 참고하여 자율자동차의 행동 중 5분 이상 동일 장소에서 대기하는 경우를 주차수요에 포함하였다. 둘째, 자가용 1대당 일평균 통행횟수 및 주차시간을 고려하여 주차수요 감소 효과를 객관적으로 산출한다. 2016년 수도권가구통행실태조사에 따르면, 자가용 통행을 하는 응답자의 경우 1일 평균 2.2회의 자동차 통행을 하는 것으로 나타났다. 따라서 본 연구는 자율주행 자동차를 이용한 여객통행 2.2회 당 자가용 1대가 대체되는 것으로 가정하였다. 또한, 2016년 서울시 교통지표의 서울시 차량 1대당 주차시간(1363.9분)을 적용하여 대체되는 자가용 1대당 감소되는 주차수요를 계산하였다.
Ⅳ. 분석 결과
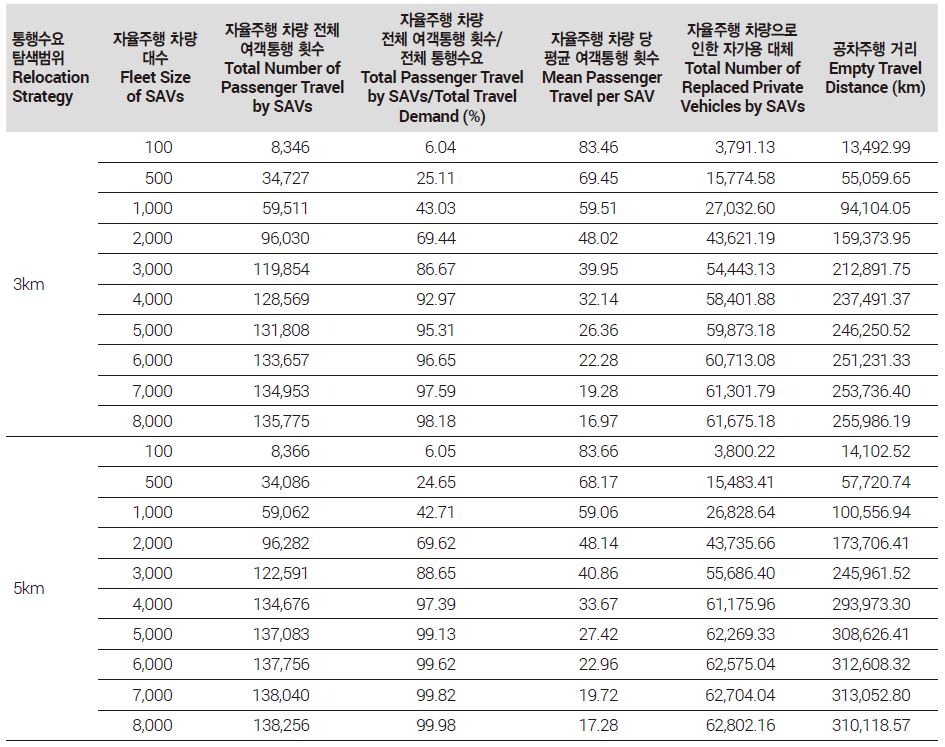
본 연구에서는 통행수요 탐색 범위 및 자율주행 자동차의 대수에 따라 총 20개의 시나리오를 설정하여 시뮬레이션을 수행하였다. 차량 재배치를 위한 통행수요 탐색 범위는 3km, 5km 두 가지 경우를 적용하였으며, 자율주행 자동차의 대수는 100대에서 8,000대 까지 10개의 값을 적용하였다. 먼저 자율주행 자동차의 여객통행 수, 자율주행 자동차 운행으로 인한 주차수요의 감소는 <표 3> 및 <그림 2>와 같다.
Number of passenger travel by SAVs and replacement of private vehicles by SAVs

Changes in the number of passenger travel by SAVs (left) and empty travel distance (right) by fleet size of SAVs and relocation strategies
통행수요 탐색 범위 3km에서 자율주행 자동차의 여객통행 수는 자율주행 자동차 대수의 증가에 따라 큰 폭으로 증가하다가 전체 통행수요(138,287회)의 95% 이상을 충족시키는 5,000대 이후로부터 그 증가폭이 크게 줄어드는 것을 확인할 수 있다. 예로, 차량대수를 1,000대에서 2,000대로 증가시켰을 때는 자율주행 자동차의 여객통행 횟수가 36,519통행 증가한 반면, 7,000대에서 8,000대로 증가시켰을 때는 비교적 적은 822통행만이 증가하였다.
통행수요 탐색 범위 5km에서는 자율주행 차량들이 보다 넓은 범위에서 통행수요를 탐색하여 탐색범위 3km 모형들과 비교하여 같은 자율주행 차량 대수에서 더 많은 여객통행을 처리하는 것을 볼 수 있다. 예로, 통행수요 탐색범위 3km, 자율주행 차량 대수 5,000대 모형에서는 전체 통행수요의 약 95.31%를 수행하는 반면, 같은 자율주행 자동차 대수에서 탐색범위 5km모형은 전체 통행수요의 99% 이상을 처리하는 것을 확인할 수 있다. 자율주행 차량 대수 2,000대까지는 탐색범위에 따라 여객통행 횟수에 큰 차이를 보이지 않다가 3,000회 이상부터 탐색범위 5km 모형들에서 같은 자율주행 차량 대수의 탐색범위 3km모형들보다 많은 여객통행을 처리하는 것을 확인하였다.
반면, 통행수요 탐색범위 5km 모형들은 같은 자율주행 자동차 대수의 탐색범위 3km범위 모형들에 비해 여객통행 중에 발생하는 실차 주행거리 뿐 아니라, 통행수요가 많은 지역으로 재배치하는 과정에서 발생하는 공차 주행거리도 더 길게 나타났다. 이는 탐색범위 5km 시나리오의 경우 같은 자율주행 차량 대수의 탐색범위 3km 시나리오에 비해, 여객통행 처리 능력 및 주차수요 감소의 측면에서는 긍정적이지만 전체 차량주행 거리 및 교통 혼잡의 측면에서는 부정적인 영향을 미칠 수 있음을 의미한다.
<그림 3>은 시간대별로 충족되지 않은 여객통행을 나타내고 있다. 대부분의 시나리오에서 오전 첨두시간인 7시와 오후 첨두시인 18시에 미충족 통행수요가 많은 것을 볼 수 있으며, 통행수요 탐색 범위 5km, 자율주행 차량 대수 8,000대 시나리오에서는 대부분의 통행수요가 처리된 것을 확인하였다.

Unserved travel demand by time, SAV fleet size, and relocation strategies, 3km (up), 5km (down)
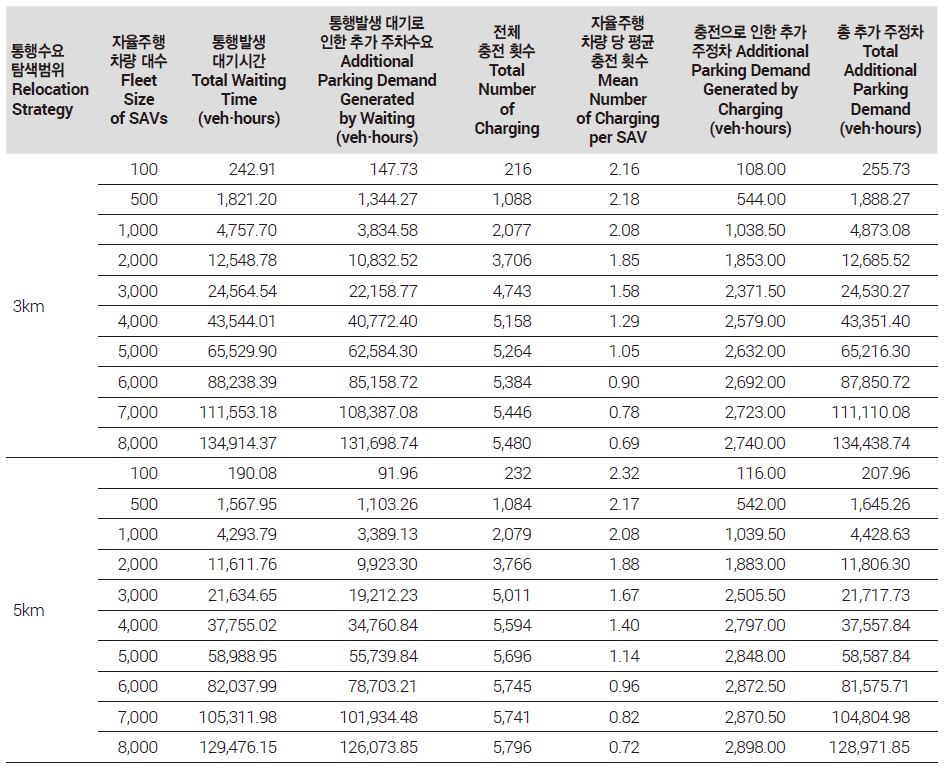
다음으로, <표 4> 및 <그림 4>는 각 시나리오별로 자율주행 차량 운영으로 생기는 추가적인 주차수요를 나타낸다. 추가적인 주차수요는 통행발생을 위해 대기하는 시간 및 충전을 위해 대기하는 시간을 고려하여 산출하였다. 앞서 설명한 바와 같이, 『도로교통법』의 주정차 기준인 5분을 참고하여, 5분 이상 대기하는 경우에만 추가적인 주차수요로 보았다. 통행발생 대기로 인한 추가적인 주차수요는 통행수요 탐색범위가 3km인 시나리오에서 더 높게 나타나는 경향을 보였다. 이는 탐색범위가 5km인 시나리오에 비해 자율주행 자동차들의 재배치가 제한적이며, 재배치 대신 대기하는 시간이 길기 때문이다. 통행발생 대기시간은 자율주행 차량대수 4,000대 시나리오부터 자율주행 차량 대수를 증가시킬 때, 통행발생 대기시간이 큰 폭으로 상승하는 것을 확인할 수 있다.
Additional parking demand generated by SAVs

Changes in additional parking demand by waiting (left) and charging (right) by sav fleet size and relocation strategies
한편, 충전으로 인한 대기시간은 통행수요 탐색범위 3km 시나리오에 비해, 5km 시나리오에서 더 높게 나타났다. 이는 통행수요를 고려한 차량재배치 범위가 더 넓은 탐색범위 5km 시나리오에서 재배치 시 발생하는 공차주행거리의 증가 때문이며, 재배치가 비교적 활발하게 진행되는 자율주행 차량 2,000회 이상 시나리오에서 그 차이가 눈에 띄게 나타난다. 하지만, 일평균 차량충전 횟수는 약 0.7~2.3회이며, 차량충전으로 인한 추가적인 주차수요는 일평균 차량 1대당 21분~69.6분 정도로 통행수요 대기로 인한 주정차에 비하면 적은 시간이다. 이로 인해, 자율주행 자동차의 운행으로 인해 발생하는 추가적인 주정차 영향의 총합은 같은 자율주행 차량 대수에서 탐색범위 3km 시나리오가 탐색범위 5km 시나리오에 비해 크게 나타났다.
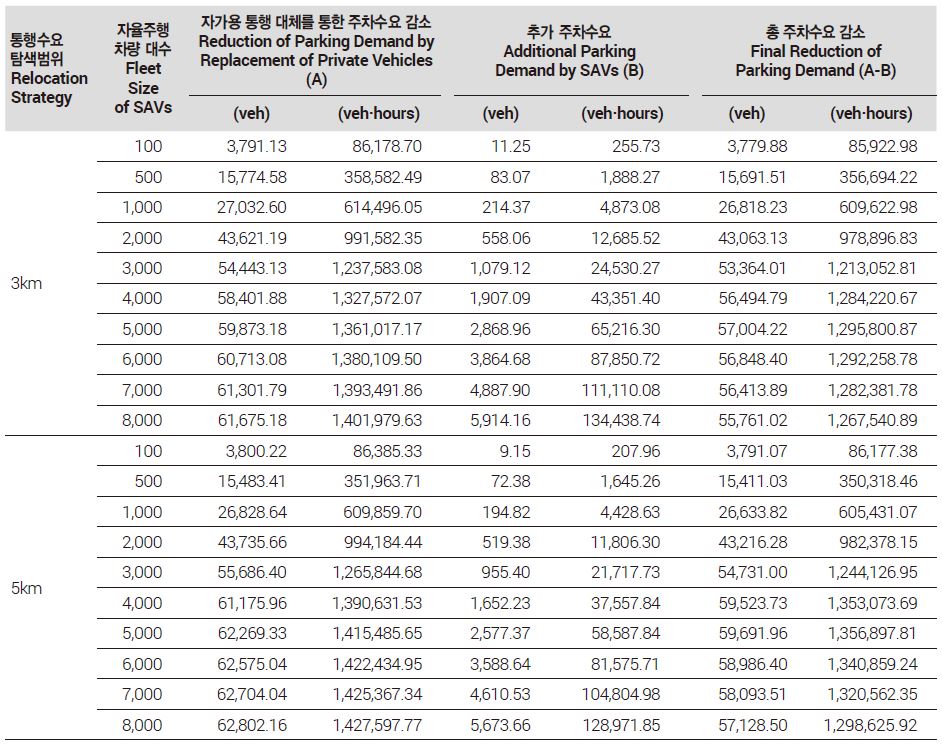
자율주행 차량 운행으로 인한 총 주차수요 감소는 <표 5>와 같다. 총 주차수요 감소분은 자율주행 자동차를 운행하면서 대체되는 자가용 통행으로 인한 주차수요 감소분과 통행발생 대기 및 충전 시 발생하는 주차수요를 고려하여 산출하였다. 통행수요 탐색범위와 자율주행 차량 대수에 따라 총 10개의 시나리오를 분석한 결과, 탐색범위 5km의 자율주행 차량 5,000대를 운행하는 시나리오에서 주차수요 감소가 가장 큰 것으로 나타났다. 따라서 서울시 자가용통행의 10%가 자율주행 자동차를 이용하는 통행으로 전환될 경우 주차수요 감소 측면에서 적정 자율주행 차량 대수는 5,000대임을 확인하였다.
Final reduction of parking demand by SAVs
탐색범위 5km, 자율주행 차량 5,000대 시나리오에서는 자율주행 차량이 1일 137,083회의 여객통행을 처리하여, 62,269.33대의 자가용을 대체하였으며, 이를 통해, 1,415,485.65대·시간의 주차수요가 감소된 것으로 볼 수 있다. 한편, 운행되는 자율주행 차량이 통행발생을 대기하거나, 충전하는데 필요한 58,587.84대·시간의 추가적인 주차수요가 발생하였다. 이를 종합적으로 고려하여, 탐색범위 5km, 자율주행 차량 5,000대 시나리오에서 1일 1,356,897.81대·시간의 주차수요를 감소시킬 수 있는 것을 확인하였다. 해당 시나리오에서 자율주행 차량 한 대가 1일 동안 처리하는 통행횟수는 27.42회이며, 이를 통해 약 12.46대의 자가용이 대체된 것으로 볼 수 있으며, Boesch et al.(2016)과 Fagnant and Kockelman(2014), 그리고 Zhang et al.(2015)에서 자율주행 공유 차량 1대가 각각 약 10대, 11대, 14대의 일반차량을 대체한다는 연구결과와 유사한 값을 나타냈다. 서울시 자가용의 1일 평균 주차시간과 해당 시나리오에서의 자율주행 차량 운행에서 발생하는 추가적인 주차수요를 고려하였을 때, 최종적으로 자율주행 차량 1대는 1일 271.38대·시간의 주차수요를 감소시킨 것으로 볼 수 있다.
통행수요 탐색범위를 3km로 설정하였을 때에도 자율주행 차량을 5,000대 운행하였을 때, 주차수요의 감소가 가장 크게 나타났다. 해당시나리오에서는 자율주행 차량 5,000대가 131,808통행을 수행하여, 59,873.18대의 자가용을 대체하였으며, 이를 통해 총 1,361,017.17대·시간의 주차수요를 감소시킨 것으로 나타났다. 자율주행 차량의 운행으로 발생하는 추가적 주차수요 65,216.30대·시간을 고려하여 최종적으로 1,295,800.87대·시간의 주차소요를 감소시키는 것으로 볼 수 있다. 이는 탐색범위 5km, 자율주행 차량 5000대 시나리오와 비교하여 95.5%정도이며, 61,096.94대·시간 낮은 값이다. 따라서 주차수요 감소의 측면에서는 넓은 통행수요 탐색범위를 적용하는 것이 타당할 것으로 판단된다.
Ⅴ. 결 론
본 연구는 서울시를 대상으로 자율주행 공유 자동차의 운행을 시뮬레이션 모델로 구현하여 분석함으로써, 자율주행 공유 자동차의 상용화가 도시 주차수요에 미치는 영향을 분석하였다. 시뮬레이션 분석은 통행수요 탐색 범위 및 자율주행 자동차의 대수를 변화시키며 총 20개의 시나리오를 분석하였다. 본 연구의 주요 분석 결과는 다음과 같다. 첫째, 서울시 자가용 통행의 10%가 자율주행 자동차로 수단 전환될 시, 최적 자율주행 차량 대수는 통행수요 탐색범위 3km와 5km 모두에서 5,000대로 나타났다. 둘째, 가장 큰 주차수요의 감소를 나타낸 통행수요 탐색범위 5km, 자율주행 자동차 5,000대 시나리오에서 1일 1,356,897.81대·시간의 주차수요를 감소시키는 것으로 나타났으며, 이는 자율주행 차량 1대당 283.13시간이다. 또한, 5,000대 이상으로 자율주행 자동차의 대수를 증가시킬 시, 증가한 자율주행 자동차의 통행발생대기로 인한 주차수요 증가가 여객통행을 수행하며 감소시키는 주차수요보다 더 커져 비효율이 발생하였다. 통행수요 탐색범위의 측면에서는 탐색범위 5km를 적용한 시나리오에서 동일한 자율주행 차량 대수의 탐색범위 3km를 적용한 시나리오 보다 더 큰 주차수요 감소가 나타났다. 이는 넓은 통행수요 탐색범위로 인해 자율주행 차량의 재배치가 효율적으로 이뤄짐에 따라, 제자리에서 통행발생을 대기하는 시간이 줄고 여객통행을 수행하는 시간이 늘어나기 때문으로 볼 수 있다. 반면, 통행수요 탐색범위가 늘어날 시, 자율주행 자동차의 재배치 과정에서 공차주행거리가 증가하기 때문에 주차수요 감소 이외의 측면에서는 이를 고려하여야 할 것으로 판단되다.
본 연구는 주차문제가 심각한 고밀 대도시인 서울시를 대상으로 자율주행 공유 자동차의 도입으로 인한 주차수요의 변화를 분석하였다는 점에서 연구의 의의가 있다. 또한, 자율주행 자동차 운행으로 인한 주차수요 감소를 산정함에 있어 자율주행 자동차의 통행발생 대기 및 충전으로 인한 주정차를 고려하여 정교한 방법으로 주차수요 감소를 산정하였다는 점에서도 차별성을 가진다. 마지막으로, 선행연구에서 주요 자료로 활용한 통행설문조사 표본 자료에 비해 자료 구득이 용이한 행정동간 차량 통행량자료를 주요 분석 자료로 활용하는 시뮬레이션 모형을 구축하여 활용하였다는 점에서 연구의 의의가 있다.
Acknowledgments
이 논문은 2018년 10월 서울연구논문 공모전 및 2019년 4월 대한국토·도시계획학회 춘계산학학술대회에서 우수 논문상을 수상한 논문을 수정·보완한 것임
References
-
고용석·육동형·노정현, 2017. “자율주행 자동차 도입으로 인한 교통 네트워크 용량증대 효과 분석”, 「국토연구」, 93: 17-24.
Ko, Y.S., Yook, D.H., and Rho, J.H., 2017. “Assessing Benefits of Autonomous Vehicle System Implementation through the Network Capacity Analysis”, The Korea Spatial Planning Review, 93: 17-24. [ https://doi.org/10.15793/kspr.2017.93..002 ]
-
고준호·유경상, 2013. 「공유교통의 시대, 무엇을 나눠쓸 것인가?」, 서울: 서울연구원.
Ko, J.H. and Yu, K.S., 2013. In the Era of Shared Transport, What Can We Share?, Seoul: The Seoul Institute. -
고준호·기현균·정상미, 2017. 「친환경차 보급 동향과 서울시 정책 방향」, 서울: 서울연구원.
Ko, J.H., Ki, H.K., and Jeong S.M., 2017. Recent Trend of Environmentally Friendly Vehicles and Seoul Policy Directions, Seoul: The Seoul Institute. -
박인선·이종덕·이재용·황기연, 2015. “자율주행차량 도입에 따른 고속도로 교통류 영향분석: 경부고속도로 서울-신갈 기본구간을 중심으로”, 「한국 ITS 학회논문지」, 14(6): 21-36.
Park, I.S., Lee, J.D., Lee, J.Y., and Hwang, K.Y., 2015. “Impacts of Automated Vehicles on Freeway Traffic-flow : Focused on Seoul-Singal Basic Sections of GyeongBu Freeway”, The Journal of The Korea Institute of Intelligent Transport Systems, 14(6): 21-36. [ https://doi.org/10.12815/kits.2015.14.6.021 ]
-
박준식·문지혜, 2013. “카셰어링 서비스의 수요추정 및 도입효과 분석”, 「교통연구」, 20(2): 59-75.
Park, J.S. and Moon, J.H., 2013. “Demand Estimation and Impact Analysis of Car-sharing Service”, Journal of Transport Research, 20(2): 59-75. [ https://doi.org/10.34143/jtr.2013.20.2.59 ]
-
서지민·석종수, 2017. “근린환경 요인을 고려한 카셰어링 대여소 배치 방안 연구”, 「한국 ITS 학회논문지」, 16(5): 49-59.
Seo, J.M. and Seok, C.S., 2017. “A Study on Optimizing Depot Location in Carsharing Considering the Neighborhood Environmental Factors”, The Journal of The Korea Institute of Intelligent Transport Systems, 16(5): 49-59. [ https://doi.org/10.12815/kits.2017.16.5.49 ]
-
정승원·문영준·이성렬·황기연, 2017. “자율주행 자동차 도입으로 인한 교통흐름 변화 분석”. 「한국 ITS 학회논문지」, 16(6): 244-257.
Jung, S.W., Moon, Y.J., Lee, S.Y., and Hwang, K.Y., 2017. “Impacts of Automated Vehicles on Traffic Flow Changes”, The Journal of The Korea Institute of Intelligent Transport Systems, 16(6): 244-257. [ https://doi.org/10.12815/kits.2017.16.6.244 ]
-
황기연·김관용·박성경, 2013. “KTX 연계교통수단으로써 카셰어링 도입방안과 경제성 평가에 대한 연구”. 「도시정책연구」, 4: 17-32.
Hwang, K.Y., Kim, K.Y., and Park. S.K., 2013. “Determining a Better KTX Transfer Mode Based on Comparative BC Analysis: Case of Carsharing and BRT in Osong Station”, Journal of Urban Policies, 4: 17-32. -
Arnaout, G. and Arnaout, J.P., 2014. “Exploring the Effects of Cooperative Adaptive Cruise Control on Highway Traffic Flow Using Microscopic Traffic Simulation”, Transportation Planning and Technology, 37(2): 186-199.
[https://doi.org/10.1080/03081060.2013.870791]
-
Boesch, P.M., Ciari, F., and Axhausen, K.W., 2016. “Autonomous Vehicle Fleet Sizes Required to Serve Different Levels of Demand”, Transportation Research Record, 2542(1): 111-119.
[https://doi.org/10.3141/2542-13]
-
Cervero, R., Golub, A., and Nee, B., 2007. “City CarShare: Longer-term Travel Demand and Car Ownership Impacts”, Transportation Research Record, 1992(1): 70-80.
[https://doi.org/10.3141/1992-09]
-
Chen, T.D., Kockelman, K.M., and Hanna, J.P., 2016. “Operations of a Shared, Autonomous, Electric Vehicle Fleet: Implications of Vehicle & Charging Infrastructure Decisions”, Transportation Research Part A: Policy and Practice, 94: 243-254.
[https://doi.org/10.1016/j.tra.2016.08.020]
-
Childress, S., Nichols, B., Charlton, B., and Coe, S., 2015. “Using an Activity-based Model to Explore the Potential Impacts of Automated Vehicles”, Transportation Research Record, 2493(1): 99-106.
[https://doi.org/10.3141/2493-11]
-
De Luca, S. and Di Pace, R., 2015. “Modelling Users’ Behaviour in Inter-urban Carsharing Program: A Stated Preference Approach”, Transportation Research Part A: Policy and Practice, 71: 59-76.
[https://doi.org/10.1016/j.tra.2014.11.001]
-
Fagnant, D.J. and Kockelman, K.M., 2014. “The Travel and Environmental Implications of Shared Autonomous Vehicles, Using Agent-based Model Scenarios”, Transportation Research Part C: Emerging Technologies, 40: 1-13.
[https://doi.org/10.1016/j.trc.2013.12.001]
-
Fagnant, D.J. and Kockelman, K.M., 2015. “Preparing a Nation for Autonomous Vehicles: Opportunities, Barriers and Policy Recommendations”, Transportation Research Part A: Policy and Practice, 77: 167-181.
[https://doi.org/10.1016/j.tra.2015.04.003]
-
Hoogendoorn, R., van Arem, B., and Hoogendoorn, S., 2014. “Automated Driving, Traffic Flow Efficiency and Human Factors: A Literature Review”, Transportation Research Record, 2422(1): 113-120.
[https://doi.org/10.3141/2422-13]
-
Ko, J., Ki, H., and Lee, S., 2019. “Factors Affecting Carsharing Program Participants’ Car Ownership Changes”, Transportation Letters, 11(4): 208-218.
[https://doi.org/10.1080/19427867.2017.1329891]
- Martinez, L. and Crist, P., 2015. Urban Mobility System Upgrade: How Shared Self-driving Cars Could Change City Traffic, Paris: International Transport Forum.
-
Milakis, D., Van Arem, B., and Van Wee, B., 2017. “Policy and Society Related Implications of Automated Driving: A Review of Literature and Directions for Future Research”, Journal of Intelligent Transportation Systems, 21(4): 324-348.
[https://doi.org/10.1080/15472450.2017.1291351]
- Plaza, C.V. and da Silva, A.N.R., 2015. “Intrazonal Trip Distances: An Estimation Approach and Application to a Case Study”, Paper presented at Transportation Research Board 94th Annual Meeting, Washington D.C.: Walter E. Washington Convention Center.
-
Shaheen, S.A. and Cohen, A.P., 2013. “Carsharing and Personal Vehicle Services: Worldwide Market Developments and Emerging Trends”, International Journal of Sustainable Transportation, 7(1): 5-34.
[https://doi.org/10.1080/15568318.2012.660103]
-
Zhang, W., Guhathakurta, S., Fang, J., and Zhang, G., 2015. “Exploring the Impact of Shared Autonomous Vehicles on Urban Parking Demand: An Agent-based Simulation Approach”, Sustainable Cities and Society, 19: 34-45.
[https://doi.org/10.1016/j.scs.2015.07.006]
-
Zhang, W. and Guhathakurta, S., 2017. “Parking Spaces in the Age of Shared Autonomous Vehicles: How Much Parking Will We Need and Where?”, Transportation Research Record, 2651(1): 80-91.
[https://doi.org/10.3141/2651-09]